








Solutions de détection pour les navettes
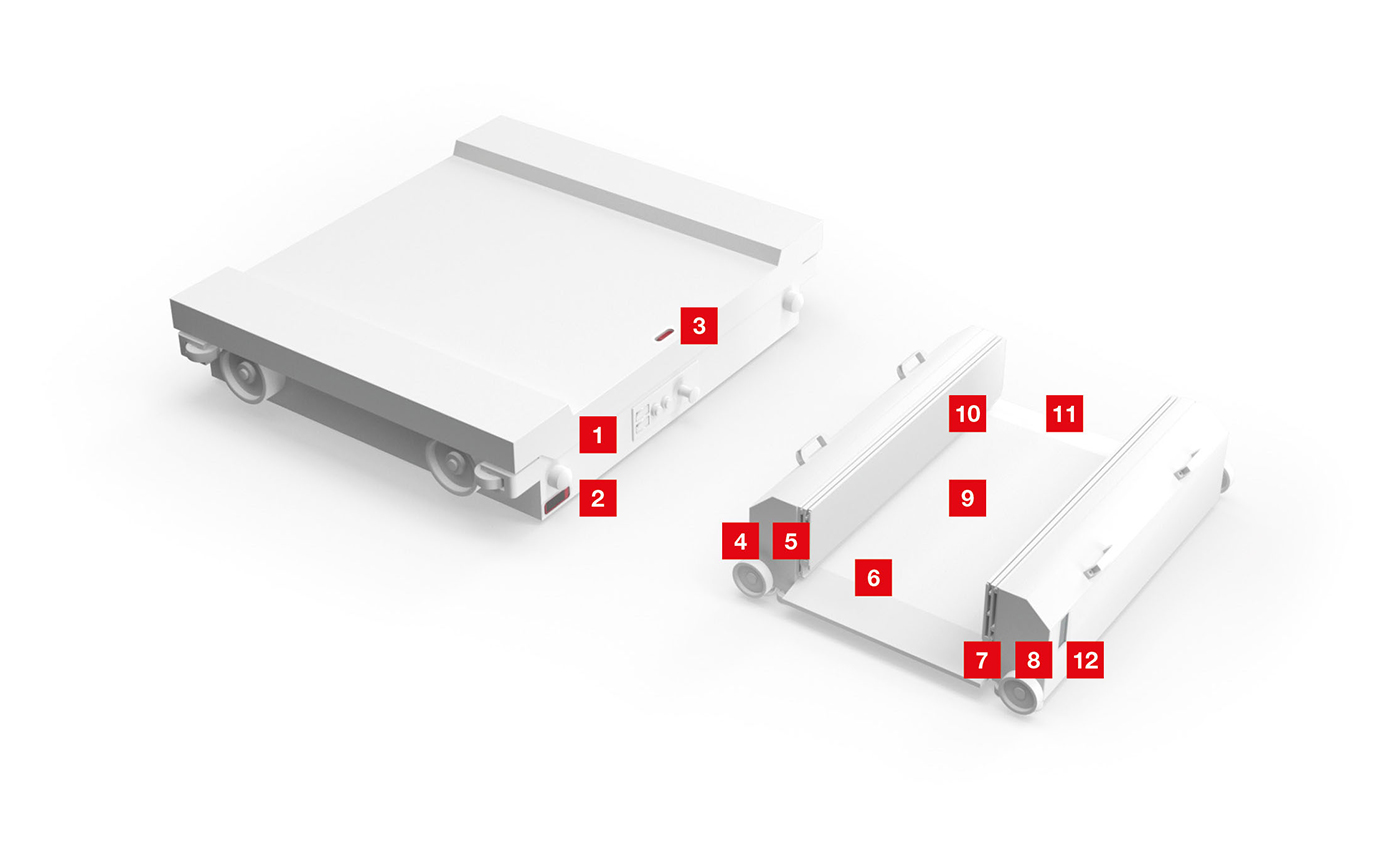
Les navettes sont des véhicules d'entrepôt compacts fonctionnant automatiquement dans les entrepôts à hauts rayonnages. Elles sont utilisées en parallèle et se déplacent de manière quasi autonome dans la structure de rayonnage. Les navettes dynamiques doivent transporter la marchandise de manière sûre, détecter efficacement les zones libres et éviter les collisions.
Nos capteurs sont optimisés pour ce domaine d'application et assument des tâches de positionnement précis dans les racks, de contrôle d'occupation des rayonnages et de contrôle de présence. Des capteurs commutant à la cadence de la milliseconde garantissent un positionnement optimal. Nos capteurs peu encombrants s'intègrent facilement même dans les véhicules bas et permettent ainsi un design flexible. Tous nos capteurs sont conçus pour une facilité d'utilisation, permettant un montage et une mise en service rapides.
[01] Positionnement de la palette

Condition :
Pour garantir une distance définie entre les palettes, la distance entre la navette et la palette stockée doit être déterminée avec précision, indépendamment des surfaces, des couleurs ou des angles.
Solution :
Les capteurs de distance mesurants ou à commutation ODS 110 et HT 110 déterminent la distance par rapport à une cible non coopérante et fournissent l'information sous forme de valeur mesurée ou de sortie de commutation. Pour une portée allant jusqu'à 5 000 mm, les appareils offrent une précision de ±15 mm.
[02] Positionnement de la navette en fin de couloir

Condition :
La première palette dans un couloir doit toujours être déposée à une distance définie par rapport à la fin de couloir. Il convient donc de déterminer la position de la navette à la fin du couloir.
Solution :
Les capteurs de distance mesurants ou à commutation ODS 110 / HT 110 fonctionnent selon la méthode du temps de propagation des impulsions (TOF) et fournissent des résultats fiables sur des distances allant jusqu'à 3 m pour des matériaux quelconques. Tous les appareils disposent d'une interface IO-Link. Pour le HT 110, il est possible de définir deux sorties de commutation indépendamment de la position.
[03] Contrôle de la présence et de la position de la palette

Condition :
Après la prise en charge de la palette sur la navette, il convient de vérifier si la palette est bien en place. Pour ce faire, la présence de la palette doit être contrôlée à une ou plusieurs positions définies sur la navette.
Solution :
Les capteurs optiques HT 3C détectent les palettes de manière fiable grâce à l'élimination active de l'arrière-plan et à la sensibilité à la lumière ambiante. La série HT 3C offre des solutions robustes, par exemple pour la détection d'objets aux structures colorées, présentant des trous ou des surfaces polies.
[04] Protection contre les collisions

Condition :
Si plusieurs navettes se déplacent sur un même niveau, il convient de vérifier si la trajectoire est libre, si une autre navette se trouve à proximité ou si la fin de l'allée est atteinte.
Solution :
Le capteur de distance ODS 10 mesure la distance par rapport à une cible non coopérante de n'importe quel matériau. Les appareils fournissent des résultats fiables avec une précision de ±15 mm sur des distances allant jusqu'à 8 m.
[05] Étalonnage

Condition :
Pour éviter tout glissement, le conteneur doit être référencé à une position située à la fin de la trajectoire ou à la station de transfert. Pour un référencement exact, les capteurs utilisés doivent disposer d'un point de commutation précis et reproductible.
Solution :
Les capteurs optiques PRK 3C fonctionnent selon le principe de réflexion. Des versions spéciales avec une haute fréquence de commutation et un petit spot lumineux garantissent un point de commutation exact.
[06] Contrôle de débordement et de surplomb

Condition :
Avant que la navette ne se mette en mouvement, il convient de vérifier que le chargement a été entièrement chargé ou déchargé et qu'il n'y a aucun débordement.
Solution :
Avec leur forme cubique compacte, les capteurs optiques de la série 5 sont utilisés pour les tâches de détection standard performantes et optimisées en termes de coûts. Les trous de fixation filetés métalliques M3 intégrées et la sortie de câble flexible vers le bas ou vers l'arrière facilitent le montage, même dans des conditions d'installation restreintes.
[07] Contrôle d'occupation de rayonnages à simple profondeur

Condition :
Avant de pouvoir stocker un conteneur ou un carton, il convient de vérifier que l'emplacement est libre.
Solution :
Les capteurs de la série 3C détectent de manière fiable les objets situés devant un arrière-plan. Même les objets dont la structure est colorée sont détectés de manière fiable.
[08] Contrôle d'occupation de rayonnages à multi-profondeur

Condition :
Avant de pouvoir stocker un conteneur ou un carton, il convient de vérifier que l'emplacement est libre.
Solution :
Les capteurs de la série 25C détectent de manière fiable les objets situés devant un arrière-plan. Même les objets dont la structure est colorée sont détectés de manière fiable. Pour les applications avec des portées supérieures à 2 m, un modèle longue portée particulièrement performant est disponible.
[09] Contrôle de position de conteneur sur la navette

Condition :
Il convient de déterminer le secteur de la navette dans lequel se trouve un conteneur ou un carton.
Solution :
Avec leur forme cubique compacte, les capteurs optiques de la série 5 sont utilisés pour les tâches de détection standard performantes et optimisées en termes de coûts. Les trous de fixation filetés métalliques M3 intégrées et la sortie de câble flexible vers le bas ou vers l'arrière facilitent le montage, même dans des conditions d'installation restreintes.
[10] Détection de la position finale du doigt

Condition :
Pour le bon déroulement du stockage et du déstockage, il convient de vérifier la position finale du doigt.
Solution :
Les détecteurs inductifs de la série IS 208 détectent les objets métalliques de manière fiable. Les petits appareils standard d’un diamètre de seulement 8 mm et au boîtier métallique robuste peuvent être intégrés de manière simple et individuelle dans la navette.
[11] Détection de la position finale de la fourche télescopique

Condition :
Avant que la navette ne se déplace, il convient de s'assurer que la fourche télescopique est entièrement rentrée. Pour ce faire, il faut contrôler la position finale de la fourche télescopique.
Solution :
Les détecteurs inductifs de la série IS 288 peuvent être utilisés pour différentes tâches de détection. Les appareils de forme cubique sont disponibles avec des boîtiers en plastique ou métallique. Le champ de détection orienté latéralement permet une intégration peu encombrante et économique.
[12] Positionnement précis dans les racks

Condition :
Pour un positionnement précis de la navette, le rail de déplacement est perforé de repères. Ceux-ci doivent être détectés de manière reproductible.
Solution :
Les détecteurs performants avec élimination de l'arrière-plan de la série 3C détectent de manière fiable les objets devant les arrière-plans les plus divers. Des variantes avec lumière laser sont disponibles pour les tâches de positionnement particulièrement précises et rapides.