








Sensorlösungen für Shuttles
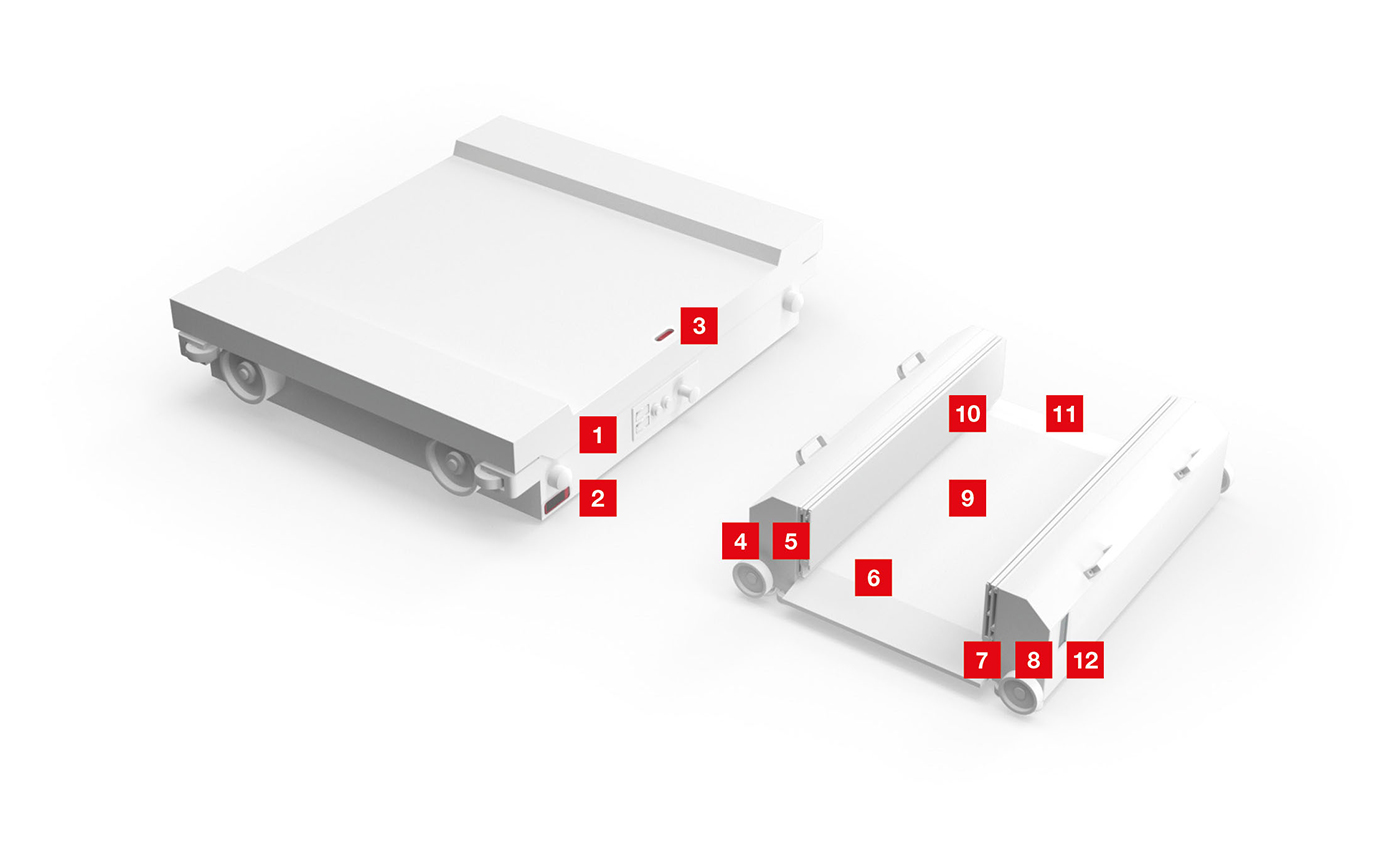
Shuttles sind kompakte Lagerfahrzeuge für die automatische Bedienung von Regallagern. Sie werden parallel eingesetzt und bewegen sich im Regalbau weitgehend unabhängig. Die dynamischen Shuttles müssen die Ware sicher transportieren, zuverlässig Freiräume erkennen und Kollisionen vermeiden.
Unsere Sensoren sind auf diesen Einsatzbereich optimiert und übernehmen Aufgaben bei der Fachfeinpositionierung, der Fachbelegtkontrolle und der Anwesenheitskontrolle. Im millisekunden-takt-schaltende Sensoren sorgen für die optimale Positionierung. Auch in niedrigen Fahrzeugen lassen sich unsere platzsparenden Sensoren gut integrieren und erlauben so ein flexibles Design. Alle unsere Sensoren sind bedienerfreundlich konzipiert und sorgen so für eine schnelle Montage und Inbetriebnahme.
[01] Positionierung der Palette

Anforderung:
Um einen definierten Abstand zwischen den Paletten zu gewährleisten, muss der Abstand zwischen dem Shuttle und der eingelagerten Palette unabhängig von Oberflächen, Farben oder Winkel genau bestimmt werden.
Lösung:
Die messenden oder schaltenden Abstandssensoren ODS 110 und HT 110 bestimmen den Abstand gegen ein nicht kooperierendes Ziel und stellen die Information als Messwert oder als Schaltausgang zur Verfügung. Bei einer Reichweite von bis zu 5.000 mm bieten die Geräte eine Genauigkeit von typ. ±15 mm.
[02] Positionierung des Shuttles am Gangende

Anforderung:
Die erste Palette in einem Gang sollte immer an einem definierten Abstand zum Gangende abgestellt werden. Dafür ist die Position des Shuttles am Ende des Gangs zu bestimmen.
Lösung:
Die messenden oder schaltenden Abstandssensoren ODS 110 / HT 110 arbeiten nach dem Pulslaufzeitverfahren (TOF) und liefern über Entfernungen bis zu 3 m zuverlässige Ergebnisse gegen beliebige Materialien. Alle Geräte verfügen über eine IO-Link-Schnittstelle. Beim HT 110 können zwei Schaltausgänge positionsunabhängig gesetzt werden.
[03] Anwesenheits- / Positionskontrolle der Palette

Anforderung:
Nach Übernahme der Palette auf das Shuttle ist zu prüfen, ob die Palette korrekt aufgesetzt wurde. Dazu soll an einer oder mehreren definierten Positionen auf dem Shuttle die Anwesenheit der Palette geprüft werden.
Lösung:
Die optischen Sensoren HT 3C detektieren durch die aktive Hintergrundausblendung und die Fremdlichtfestigkeit zuverlässig Paletten. Die Serie HT 3C bietet robuste Lösungen, z. B. für die Erkennung von farblich strukturierten Objekten, Objekten mit Durchbrüchen oder mit hochpolierten Oberflächen.
[04] Auffahrsicherung

Anforderung:
Bewegen sich mehrere Shuttles in einer Ebene, so muss geprüft werden, ob der Fahrweg frei, ein anderes Shuttle in der Nähe oder das Gassenende erreicht ist.
Lösung:
Der Abstandssensor ODS 10 misst den Abstand gegen ein nicht kooperierendes Ziel aus beliebigem Material. Über Entfernungen bis zu 8 m liefern die Geräte zuverlässige Ergebnisse mit einer Genauigkeit von typ. ±15 mm.
[05] Referenzierung

Anforderung:
Um Schlupf entgegen zu wirken, soll am Ende des Fahrwegs oder an der Übergabestation der Behälter auf eine Position referenziert werden. Für die exakte Referenzierung sollen die verwendeten Sensoren über einen genauen und reproduzierbaren Schaltpunkt verfügen.
Lösung:
Die optischen Sensoren PRK 3C arbeiten nach dem Reflexionsprinzip. Spezielle Ausführungen mit hoher Schaltfrequenz und kleinem Lichtfleck sorgen für einen exakten Schaltpunkt.
[06] Kontrolle von Überstand und Überhang

Anforderung:
Bevor sich das Shuttle in Bewegung setzt, ist zu prüfen, ob die Ladung komplett aufgenommen oder abgeladen wurde, und dass kein Überstand vorhanden ist.
Lösung:
Die optischen Sensoren der Serie 5 werden mit ihrer kompakten kubischen Bauform für leistungsfähige und kostenoptimierte Standard-Detektionsaufgaben eingesetzt. Die integrierten M3-Metallgewindehülsen und der flexible Kabelabgang nach unten oder nach hinten erleichtern die Montage auch bei beengten Einbausituationen.
[07] Fachbelegtkontrolle – einfachtief

Anforderung:
Bevor ein Behälter oder Karton eingelagert werden kann, muss geprüft werden, ob der Platz frei ist.
Lösung:
Die tastenden Sensoren der Serie 3C detektieren zuverlässig Gegenstände vor einem Hintergrund. Auch farblich strukturierte Objekte werden zuverlässig erkannt.
[08] Fachbelegtkontrolle – mehrfachtief

Anforderung:
Bevor ein Behälter oder Karton eingelagert werden kann, muss geprüft werden, ob der Platz frei ist.
Lösung:
Die tastenden Sensoren der Serie 25C detektieren zuverlässig Gegenstände vor einem Hintergrund. Auch farblich strukturierte Objekte werden zuverlässig erkannt. Für Anwendungen mit Reichweiten über 2 m ist die besonders leistungsfähige Long-Range-Variante verfügbar.
[09] Kontrolle der Behälterposition auf dem Shuttle

Anforderung:
Es soll bestimmt werden, in welchem Bereich des Shuttles sich ein Behälter oder Karton befindet.
Lösung:
Die optischen Sensoren der Serie 5 werden mit ihrer kompakten kubischen Bauform für leistungsfähige und kostenoptimierte Standard-Detektionsaufgaben eingesetzt. Die integrierten M3-Metallgewindehülsen und der flexible Kabelabgang nach unten oder nach hinten erleichtern die Montage auch bei beengten Einbausituationen.
[10] Erkennen der Endlage des Fingers

Anforderung:
Für den korrekten Ablauf des Ein- und Auslagerns ist die Endlage des Fingers zu prüfen.
Lösung:
Die induktiven Sensoren der Serie IS 208 erkennen zuverlässig metallische Objekte. Die kleinen Standard-Geräte mit nur 8 mm Durchmesser und robustem Metallgehäuse lassen sich einfach und individuell in das Shuttle integrieren.
[11] Erkennen der Endlage der Teleskopgabel

Anforderung:
Bevor sich das Shuttle bewegt, muss sicher gestellt sein, dass die Teleskopgabel vollständig eingefahren ist. Dazu ist die Endposition der Teleskopgabel zu prüfen.
Lösung:
Diese induktiven Sensoren der Serie IS 288 sind für verschiedene Detektionsaufgaben einsetzbar. Die Geräte mit kubischen Bauformen sind mit Kunststoff- und Metallgehäuse erhältlich. Mit ihrem seitlich ausgerichteten Sensorfeld ist eine platz- und kostensparende Integration möglich.
[12] Fachfeinpositionierung

Anforderung:
Zur genauen Positionierung des Shuttles sind Loch-Markierungen in der Fahrschiene angebracht. Diese sollen reproduzierbar erkannt werden.
Lösung:
Die leitungsfähigen Lichttaster mit Hintergrund-ausblendung der Serie 3C erkennen zuverlässig Objekte vor verschiedensten Hintergründen. Für besonders genaue und schnelle Positionieraufgaben stehen Varianten mit Laserlicht zur Verfügung.