








Approche parallèle
Assistant de calcul selon EN ISO 13855:2010
Les recommandations de cet assistant ne prétendent pas à l'exhaustivité. Pour une utilisation et une installation sûres et correctes des produits, il convient de respecter les normes et réglementations pertinentes dans leur version actuellement en vigueur. Leuze electronic GmbH + Co. KG décline toute responsabilité pour les dommages qui pourraient être causés par l'utilisation de cet assistant et quant à l'exactitude des normes et directives établies.
Calcul de la distance minimale pour la sécurisation d'une zone avec approche parallèle à l'aide d'un scanner laser de sécurité
 |
La distance minimale SRT est calculée à l'aide de la formule suivante : S - Distance minimale entre la zone dangereuse et le point de détection C : = 1200 mm - 0,4 * H Z - Distances supplémentaires avec les scanners laser de sécurité |
Dans le cas des scanners laser de sécurité, la norme CEI 61496-3 stipule que des distances supplémentaires doivent être prises en compte :
- ZSM pour la correction de l'erreur de mesure. Cette valeur dépend de l'appareil et est indiquée dans le mode d'emploi correspondant. Avec le scanner laser de sécurité RSL 400 de Leuze, un ZSM de 100 mm s'applique pour un rayon de champ de protection ≤ 6,25 m et un ZSM de 120 mm pour un rayon de champ de protection > 6,25 m.
- ZREFL : Évitez d'utiliser des catadioptres dans le plan du faisceau au-delà de la limite du champ de protection. Si cela n'est pas possible, il faut ajouter une distance supplémentaire ZREFL de 100 mm.
Remarque concernant l'utilisation sur des véhicules à guidage automatique :
Conformément à la norme EN ISO 3691-4 « Chariots de manutention - Exigences de sécurité et vérification », les essais du dispositif de protection doivent également prendre en considération les conditions les plus défavorables (par exemple, la charge, l'inclinaison du chemin de transport) en combinaison avec les paramètres spécifiés pour le chariot. La taille du champ de protection peut augmenter en raison de ces exigences.
Calcul de la distance minimale (distance de sécurité) pour la sécurisation d'une zone avec approche parallèle à l'aide d'une barrière immatérielle de sécurité
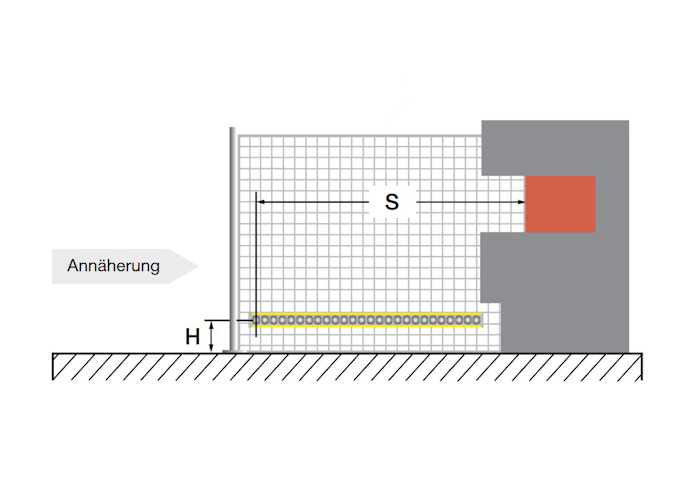 |
La distance minimale SRT est calculée à l'aide de la formule suivante : S - Distance minimale entre la zone dangereuse et le point de détection C - Constantes liées à la sécurité pour la prise en compte de la pénétration dans la zone dangereuse avant le déclenchement du dispositif de protection. C= 1200 mm - 0,4 * H, CMin = 850 mm H : Hauteur du champ de protection au-dessus du plan de référence Résolution requise d avec la hauteur de montage H : d [mm] ≤ (H/15) + 50 mm Remarque : les hauteurs supérieures à 300 mm sont considérées comme des hauteurs sous lesquelles une personne peut ramper. |