








Electro-sensitive protective devices
IEC 62046 "Safety of machinery - Application of protective equipment to detect the presence of persons" contains basic information for selecting, applying, connecting and commissioning electro-sensitive protective devices and safety mats. It addresses the designers, inspection bodies, authors of machine-specific C-standards and anyone that is involved with the professional installation of such protective devices.
A prerequisite for the application of electro-sensitive protective devices is a risk assessment in accordance with ISO 12100. This must show that the protective device is suitable for risk reduction of the relevant hazards. The following points must be observed, e.g.:
- Electro-sensitive protective devices do not protect against injuries caused by projected (thrown out) objects or emissions from the machine. As a rule, they are very suitable for mechanical and electrical hazards, but usually not for risk reduction of thermal hazards as well as noise, vibration, radiation, material hazards, etc.
- The machine design and the production process must permit dangerous movements to be stopped at any point during processing.
- Electro-sensitive protective devices must be mounted in such a way that reaching into/access to the point of operation is only possible through the protective field. Reach-over/step-over as well as reach-under/crawl-under must be prevented by means of additional protective devices (e.g. guards) if necessary.
- With point of operation guarding (finger and hand protection) and danger zone safeguarding, no part of a person's body may enter or be present in the danger zone undetected. Additional protective devices may need to be provided, e.g. stepping behind protection with a cascadable safety light curtain. Step-behind that goes undetected by the protective device itself may then only be possible if the safety function is equipped with a restart interlock.
- The safety distance between the protective device and the point of operation must be big enough that the dangerous movement will have stopped before a part of the person’s body can reach the point of operation
- Reflective surfaces near optoelectronic protective devices can cause objects not to be detected because of the protective device’s beams being reflected. An appropriate minimum distance according to the operating instructions must be observed to prevent this.
The correct optoelectronic protective device must be selected in the following steps:
Step 1: Performing a risk assessment in accordance with ISO 12100
The risk assessment must be performed before the designing of a machine begins. It must be performed for all life stages and uses of the machine. Recognized and documented risks must be reduced in the following order of priority:
- Risk avoidance through design modifications
- Risk reduction through technical protective measures
- Reduction of the residual risks through organizational measures
Additional protective measures are only introduced if a hazard cannot be avoided by modifying the machine design. If an ESPE is chosen as a risk-reducing protective measure, proceed to step 2.
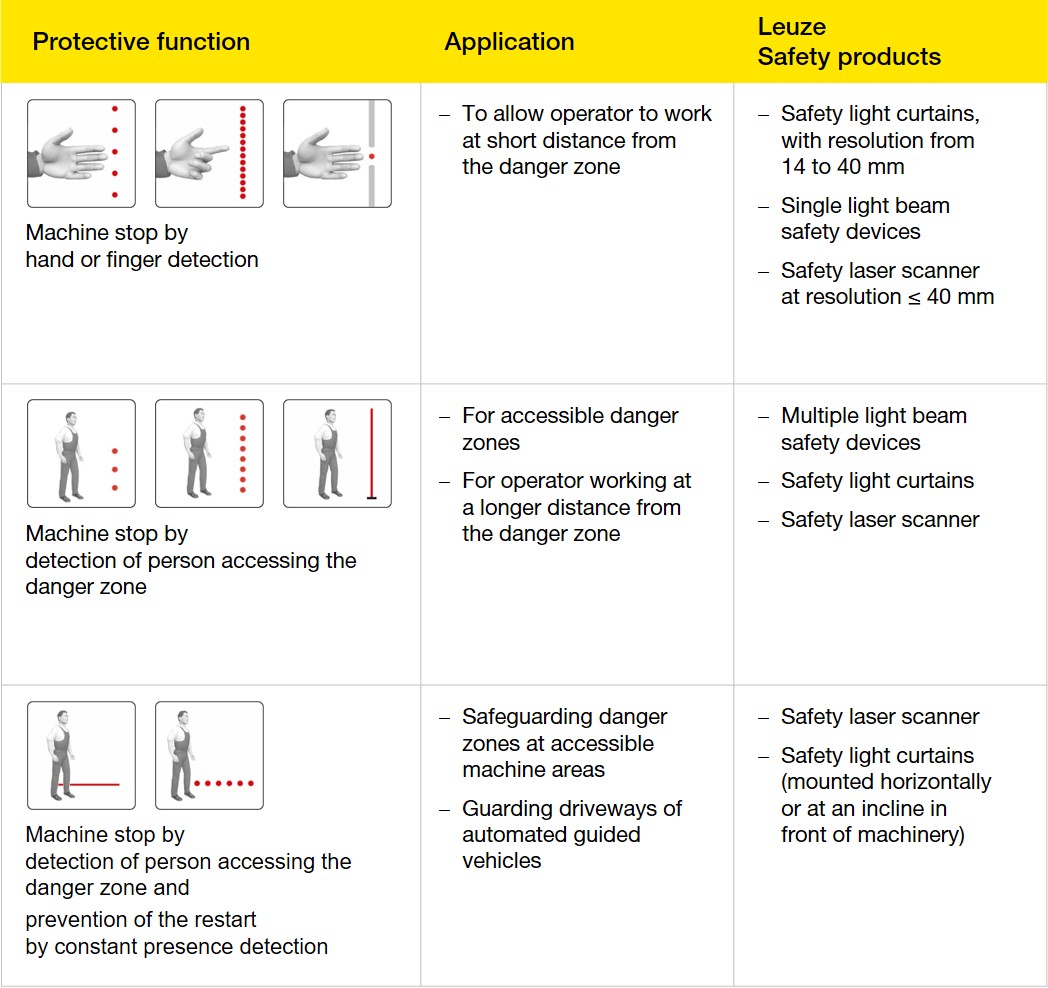
Step 2: Selecting the protective function and type of optoelectronic protective device
The selection of a suitable optoelectronic protective device primarily depends on the following criteria:
- Specifications of regional or machine-specific regulations
- Geometric dimensions of the area to be protected
- Protective function to be performed (e.g. machine stop with hand or finger detection)
- Ergonomic factors (e.g. ease of operation, manual cyclical insertion of parts, ...)
- Accessibility of danger zones, depending on process and maintenance
- economical criteria
Step 3: Selecting the required type of optoelectronic protective device
The optoelectronic protective device is a component of the safety-related part of the machine control system and a component of a safety function consisting of sensor, control unit and actuator(s). Based on the risk assessment conducted in accordance with ISO 12100 and possibly ISO 13849-1 or IEC 62061, the design engineer determines the safety-related performance required for risk reduction individually for every safety function. Regardless of the control standard applied, the achieved level of safety-related performance (PL, SIL) of the safety function is always less than or equal to the lowest value of its components (subsystems/partial systems). Put simply: the chain is as strong as its weakest link.
Optoelectronic protective devices have different safety-related capacities, depending on the detection principle and the internal technical setup. IEC 61496-1 "Safety of machinery – Electro-sensitive protective equipment – Part 1: General requirements and tests" defines 3 types of electro-sensitive protective equipment (ESPE), which differ in their effectiveness and the requirements regarding error detection, i.e. their safety-related performance.
According to IEC 61496-1, the type of ESPE is intrinsically linked to PL and SIL requirements. For an ESPE type, neither a higher PL/SIL nor a lower PL/SIL may be specified than:
| Type in accordance with IEC 61496-1 PL in accordance with ISO 13849-1 SIL in accordance with IEC 62061 |
Effectiveness and frequency of error detection |
| Type 2, PL c, SIL 1 |
The ESPE must have a system for performing periodic tests. A fault must be detected
and lead to shutdown of at least one output. |
| Type 3, PL d, SIL 2 |
The ESPE must detect every individual safety-critical fault. The protective function must be retained throughout. A fault that leads to a reduction in detection capability must be detected
or on completion of a test triggered by an external test signal, if present |
| Type 4, PL e, SIL 3 |
A single fault that leads to a loss of detection capability must cause the ESPE to change to an interlock state within the reaction time. A single fault that impairs the switching off capacity or the reaction time must be detected
or with resetting of an internal start/restart interlock, if present |
The selection of the appropriate type of protective devices for sufficient risk reduction is always the responsibility of the machine constructor or system integrator. Regional laws or machine-specific specifications, reasons of product liability or the amount of material damage can result in the selection of another type of protective device with higher safety-related capacity, based on the risk assessment.
Step 4: Determining the safety distance
Optoelectronic protective devices can only perform their protective function if they are installed with a sufficient distance from the nearest danger point of operation. This safety distance must be large enough that all relevant dangerous movements will have stopped before a part of a person's body can reach the point of operation. After determining the safety distance it should be checked and ensured that this minimum distance allows ergonomic operation of the machine for the operator. If this is not the case, either a different safety concept or an ESPE with higher resolution must be selected.
The following overview is based on calculation in accordance with ISO 13855 and on recommendations given in IEC 62046. If the machine is the subject of a certain specification, such as machine-specific European C-standards and OSHA / ANSI standards, then reference can be made to this.
The minimum distance of a protective device through the protective field to the point of operation SRT must be calculated using the following formula:
| SRT = (K x T) + CRT | |
| SRT | The minimum safety distance in millimeters from the next point of operation to the detection point (protective field) of the protective device. An "S" of 100 mm must be observed regardless of the calculated value. |
| K | Approach speed in millimeters per second, derived from data of the approach speeds of the body and body parts. Walking speed (lower limbs): K = 1600 mm/s Grabbing speed (upper limbs): K = 2000 mm/s |
| T | Stopping time of the entire system (protective device response time + interface response time + machine stopping time) in seconds (IEC 62046 requires at least an additional 10 % on top of the determined stopping time to allow for possible deteriorations). |
| CRT | An additional distance in millimeters. This additionally added distance is based on the fact that, depending on the resolution of the protective device, a body part can get a certain distance closer to points of operation before it is detected by the protective device. |
In addition, the required minimum distance with respect to reach-over SRO must be determined using the additional distance CRO.
The larger of the two values SRT and SRO is the safety distance to be applied between the ESPE and the point of operation.
The following table is used to determine CRO (dimensions in millimeters):
|
|
|
|||||||||||
|
Height of the danger zone |
Height of top edge of protective field of electro-sensitive protective equipment |
|||||||||||
| 900 | 1 000 | 1 100 | 1 200 | 1 300 | 1 400 | 1 600 | 1 800 | 2 000 | 2 200 | 2 400 | 2 600 | |
|
Additional distance to the danger zone CRO |
||||||||||||
| 2 600 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 2 500 | 400 | 400 | 350 |
300 |
300 | 300 | 300 | 300 | 250 | 150 | 100 | 0 |
| 2 400 | 550 | 550 | 550 | 500 | 450 | 450 | 400 | 400 | 300 | 250 | 100 | 0 |
| 2 200 | 800 | 750 | 750 | 700 | 650 | 650 | 600 | 550 | 400 | 250 | 0 | 0 |
| 2 000 | 950 | 950 | 850 | 850 | 800 | 750 | 700 | 550 | 400 | 0 | 0 | 0 |
| 1 800 | 1 100 | 1 100 | 950 | 950 | 850 | 800 | 750 | 550 | 0 | 0 | 0 | 0 |
| 1 600 | 1 150 | 1 150 | 1 100 | 1 000 | 900 | 850 | 750 | 450 | 0 | 0 | 0 | 0 |
| 1 400 | 1 200 | 1 200 | 1 100 | 1 000 | 900 | 850 | 650 | 0 | 0 | 0 | 0 | 0 |
| 1 200 | 1 200 | 1 200 | 1 100 | 1 000 | 850 | 800 | 0 | 0 | 0 | 0 | 0 | 0 |
| 1 000 | 1 200 | 1 150 | 1 050 | 950 | 750 | 700 | 0 | 0 | 0 | 0 | 0 | 0 |
| 800 | 1 150 | 1 050 | 950 | 800 | 500 | 450 | 0 | 0 | 0 | 0 | 0 | 0 |
| 600 | 1 050 | 950 | 750 | 550 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 400 | 900 | 700 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 200 | 600 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
In addition, the following minimum and maximum heights above the reference plane must be observed in order to prevent crawl-under or step-over of the protective field:
- Bottom beam of ESPE: ≤ 300 mm
- Top beam of ESPE: ≥ 900 mm
(Exception for 2-beam ESPEs: bottom beam ≤ 400 mm, provided that the risk assessment permits this).
If an ESPE is integrated in a safe control system, it must be ensured that the OSSD outputs of the ESPE and the inputs of the safe evaluation unit (e.g. F-PLC) are compatible with each other and that the permissible cable length as specified in the manual from the manufacturer is observed. If the overall cable length including all collector cables between the ESPE and connection point at the control in the switch cabinet is greater than the permissible cable length, then it may no longer be possible to guarantee detection of faults in the wiring by the OSSD of the ESPE.
Installation with protective field orthogonal to approach direction
Safety light curtains are often installed vertically in order to safeguard points of operation and danger zones. Approach is then in orthogonal direction through the protective field. They are used to safeguard against
- access with the upper limbs
- entry with the whole body
According to ISO 13855, all approaches are regarded as orthogonal if the protective field is installed at an angle of more than ± 30° relative to the approach direction. Furthermore, not only is the direction of movement through the protective field to be taken into account, so too is the circumventing of the protective device e.g. by reaching over. Therefore, both the value for reaching through the protective field (SRT) and the value for reaching over (SRO) must be calculated to determine the safety distance.
Note: Reaching under the light curtain is currently not considered by ISO 13855 and therefore has to be evaluated in the risk assessment.
SRT for protective devices with detection value d (resolution) ≤ 40 mm
The minimum distance SRT is calculated using the following formula:
SRT [mm] = (K[mm/ms] x T [ms]) + CRT [mm]
SRT: Minimum distance between the protective field and point of operation
K: Approach speed
T: Stopping time of the entire system
CRT: Constant additional distance depending on the detection capability of the protective device: CRT = 8 x (d[mm] – 14 mm)
Initially, the value of 2.0 mm/ms must be used for K. If the calculation results in SRT > 500 mm, then the calculation may be repeated with K = 1.6 mm/ms. In this case, the result SRT must be at least 500 mm. If this is not the case, SRT = 500 mm is set.
Attention: The distance S to the point of operation must be at least 100 mm, even if a lower value was calculated.

If electro-sensitive protective equipment is also used to control the machine (safety light curtains with single or double cycle function), its resolution must be ≤ 30 mm.
SRT for protective device with detection capability d (resolution) > 40 mm:
With a detection capability d (resolution) > 40 mm, it can no longer be guaranteed that fingers or hands are reliably detected. An additional distance of 850 mm must therefore be added. This value is based on the normative consideration of the reach of an arm.
SRT [mm] = (1.6 mm/ms x T [ms]) + 850 mm
If it is possible to reach over the protective field of the light curtain because e.g. no mechanical barrier exists, this must be additionally considered.
SRO – Minimum reach-over distance
In addition to the minimum distance SRT (reach through), the minimum distance SRO (reach over) must also be calculated. The larger of the two values gives the minimum distance S to be observed.
SRO [mm] = (K[mm/ms] x T [ms]) + CRO [mm]
CRO is given in the following table for the additional distance in the case of reach-over of the top beam. For example, if the height of the point of operation is 1400 mm and the height of the top beam is 1000 mm, the additional distance CRO is 1200 mm.
Dimensions in millimeters
|
|
|
|||||||||||
|
Height of the danger zone |
Height of top edge of protective field of electro-sensitive protective equipment |
|||||||||||
| 900 | 1 000 | 1 100 | 1 200 | 1 300 | 1 400 | 1 600 | 1 800 | 2 000 | 2 200 | 2 400 | 2 600 | |
|
Additional distance to the danger zone CRO |
||||||||||||
| 2 600 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 2 500 | 400 | 400 | 350 | 300 | 300 | 300 | 300 | 300 | 250 | 150 | 100 | 0 |
| 2 400 | 550 | 550 | 550 | 500 | 450 | 450 | 400 | 400 | 300 | 250 | 100 | 0 |
| 2 200 | 800 | 750 | 750 | 700 | 650 | 650 | 600 | 550 | 400 | 250 | 0 | 0 |
| 2 000 | 950 | 950 | 850 | 850 | 800 | 750 | 700 | 550 | 400 | 0 | 0 | 0 |
| 1 800 | 1 100 | 1 100 | 950 | 950 | 850 | 800 | 750 | 550 | 0 | 0 | 0 | 0 |
| 1 600 | 1 150 | 1 150 | 1 100 | 1 000 | 900 | 850 | 750 | 450 | 0 | 0 | 0 | 0 |
| 1 400 | 1 200 | 1 200 | 1 100 | 1 000 | 900 | 850 | 650 | 0 | 0 | 0 | 0 | 0 |
| 1 200 | 1 200 | 1 200 | 1 100 | 1 000 | 850 | 800 | 0 | 0 | 0 | 0 | 0 | 0 |
| 1 000 | 1 200 | 1 150 | 1 050 | 950 | 750 | 700 | 0 | 0 | 0 | 0 | 0 | 0 |
| 800 | 1 150 | 1 050 | 950 | 800 | 500 | 450 | 0 | 0 | 0 | 0 | 0 | 0 |
| 600 | 1 050 | 950 | 750 | 550 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 400 | 900 | 700 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 200 | 600 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
Light curtain with horizontal protective field arrangement
Applications with horizontally arranged light curtains and parallel approach to the protective field can be used for rectangular plane guarding in front of the point of operation. They can be used
- as pure stepping behind protection between a protective device with approach reaction (e.g. a vertically arranged light curtain) and a point of operation
- and as a combined protective device with approach and presence detection function
. A restart interlock is absolutely necessary if it is possible to leave the protective field e.g. by climbing onto machine parts.
The following calculation formula for the minimum distance applies to optoelectronic protective device applications where the approach direction of the body part is parallel or at an angle up to 30° to the protective-field plane:
S [mm] = (1.6 mm/ms x T [ms]) + C [mm] with
C [mm] = (1200 mm – 0.4 x H [mm]); H ≤ 1000 mm; Cmin = 850 mm
The required detection capability d of the horizontally arranged AOPD is calculated from the height H of the protective field above the reference plane as follows:
d [mm] ≤ (H [mm] / 15) + 50 mm

Structure of point of operation guarding with horizontally arranged light curtain
Light curtain with blanking
Blanking is an optional function of light curtains for disabling the monitoring function of individual beams. This allows objects to be within the protective field without causing shutdown of the safety-related switching output OSSD. A distinction is made between the following blanking types:
- Fixed blanking – objects of fixed size must be located at a specific position in the protective field
- Floating blanking – objects of fixed size may move in a beam area assigned to them within the protective field
Blanking is always monitored – "monitored blanking". This means that beams that were configured as blanked also have to be interrupted. Otherwise the OSSDs will be switched off. Blanked objects cannot therefore be simply removed from the protective field. They must be permanently present in the expected size and at a permitted position.
In applications with blanking, steps must be taken to prevent non-monitored areas occurring in the shadow of the blanked objects. These must be safeguarded e.g. by using mechanical diaphragms.
If a light curtain provides the possibility of activating or deactivating the blanking function via a control signal during operation, this signal may also be generated by the non-safe signal of the control.
Fixed blanking
A certain blanking pattern is permanently configured, e.g. by teach-in. The blanked objects may now no longer change their position. The detection capability of the remaining protective field is maintained and corresponds to the physical light curtain resolution specified on the name plate.
In an extended model, slight changes in the position of the blanked objects, e.g. due to vibrations, are tolerated. Here, the peripheral beams at the object boundaries may optionally be interrupted. As a result of this extended size tolerance, the detection capability decreases by one beam in the critical peripheral area of the blanking objects. Depending on the physical resolution of the light curtain, the effective resolution to be used for the distance calculation decreases.
Fixed blanking can be used advantageously for the simple blanking of supporting tables at machine tools or of conveying equipment used in logistics.
Floating blanking
For each blanked object, the object size and movement area must be configured, e.g. by teach-in. The movement areas of the individual objects may not overlap. After configuration, all objects can move freely within their respective protective field area. As the object size detected by the light curtain fluctuates due to the movement around a beam, the detection capability decreases by one beam. Depending on the physical resolution of the light curtain, the effective resolution to be used for the distance calculation decreases.
Light curtain with reduced resolution
The "reduced resolution" function tolerates objects up to a defined size in the protective field. Unlike blanking, these relatively small objects (e.g. metal plates or wooden boards) may also leave the protective field. Depending on the configuration of the reduced resolution, one, two or three neighboring beams may be interrupted without the OSSD being switched off. Any number of objects may be located and move inside the protective field, just as long as no more than the maximum permissible number of adjacent beams is interrupted. Depending on the physical resolution of the light curtain, the effective resolution to be used for the distance calculation decreases.
If the light curtain provides the possibility of activating or deactivating the "reduced resolution" function during operation, actuation must be safe ⟹ safe control and e.g. 2-channel inverse signal transmission.
Reflection bypass of light curtains
Protective sensors and safety light curtains consist of a transmitter and receiver unit, which usually operate using invisible infrared radiation. The permissible opening angle of both the transmitter and receiver is subject to severe normative restrictions. The infrared light is therefore emitted from the transmit elements in a very limited scanning angle and is also received within this scanning angle by the receive elements – both devices must therefore be aligned with each other.
Reflective surfaces close to the light cone of the transmitter can prevent the detection of objects in the protective field in cases where their reflectance is so great that sufficient light from the transmitter to the receiver is deflected past the object.
For this reason, depending on the type of protective device, minimum distances to the reflective surfaces must be observed as specified in IEC 61496-1. These minimum distances are given in the operating instructions of the respective device.
Mutual interference of light curtains
Light curtains that are extremely close together can interfere with each other if light from one transmitter strays into the receiver of the adjacent protective device. This often results in unintended shutdown due to synchronization errors. It can, however, also lead to safety issues caused by incorrect synchronization of a receiver with the adjacent transmitter. This is why these types of arrangements must be avoided.
To avoid mutual interference, the position of the transmitter and receiver can be switched over so that the light is emitted in the opposing direction:
Arrangement of adjacent protective devices to avoid mutual interference
A number of devices additionally have selectable transmission channels (beam coding). They ensure that even closely arranged light curtains operate safely and reliably. Each receiver then only operates with the light from the transmitter with the expected beam coding. This enables transmitters and receivers to be freely integrated in the system.
Multiple light beam safety devices / light barriers
If the risk assessment shows that the detection of penetration by the entire body of a person is sufficient (access guarding), the following formula for determining the minimum distance must be applied:
SRT [mm] = (1.6 mm/ms x T [ms]) + 850 mm
The value 850 mm is based on the normative consideration of the reach of an arm.
Reach-over must also be taken into consideration for multiple light beam devices / light barriers. The table values for CRO apply. As a rule, the fixed additional distance of 850 mm is therefore not sufficient.
|
|
|
|||||||||||
|
Height of the danger zone |
Height of top edge of protective field of electro-sensitive protective equipment |
|||||||||||
| 900 | 1 000 | 1 100 | 1 200 | 1 300 | 1 400 | 1 600 | 1 800 | 2 000 | 2 200 | 2 400 | 2 600 | |
|
Additional distance to the danger zone CRO |
||||||||||||
| 2 600 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 2 500 | 400 | 400 | 350 |
300 |
300 | 300 | 300 | 300 | 250 | 150 | 100 | 0 |
| 2 400 | 550 | 550 | 550 | 500 | 450 | 450 | 400 | 400 | 300 | 250 | 100 | 0 |
| 2 200 | 800 | 750 | 750 | 700 | 650 | 650 | 600 | 550 | 400 | 250 | 0 | 0 |
| 2 000 | 950 | 950 | 850 | 850 | 800 | 750 | 700 | 550 | 400 | 0 | 0 | 0 |
| 1 800 | 1 100 | 1 100 | 950 | 950 | 850 | 800 | 750 | 550 | 0 | 0 | 0 | 0 |
| 1 600 | 1 150 | 1 150 | 1 100 | 1 000 | 900 | 850 | 750 | 450 | 0 | 0 | 0 | 0 |
| 1 400 | 1 200 | 1 200 | 1 100 | 1 000 | 900 | 850 | 650 | 0 | 0 | 0 | 0 | 0 |
| 1 200 | 1 200 | 1 200 | 1 100 | 1 000 | 850 | 800 | 0 | 0 | 0 | 0 | 0 | 0 |
| 1 000 | 1 200 | 1 150 | 1 050 | 950 | 750 | 700 | 0 | 0 | 0 | 0 | 0 | 0 |
| 800 | 1 150 | 1 050 | 950 | 800 | 500 | 450 | 0 | 0 | 0 | 0 | 0 | 0 |
| 600 | 1 050 | 950 | 750 | 550 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 400 | 900 | 700 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 200 | 600 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
ISO 13855 and IEC 62046 specify the following for multiple beam optoelectronic access guarding:
- Bottom beam is not higher than 300 mm above the reference plane
- Top beam is not lower than 900 mm above the reference plane
An exception exists for 2-beam light barriers: here the height of the bottom beam can be ≤ 400 mm if the risk assessment or a C-standard permits this.
Constructively, commercially available multiple light beam safety devices are designed such that the permissible distance of 500 mm between 2 beams to prevent climb-through is always observed; the user does not therefore need to do anything.
This arrangement of the protective device allows a person to be between the sensor and the point of operation without being detected after stepping through the protective field. A start/restart interlock that reliably prevents the machine from starting must therefore be provided. The command device for resetting (reset button) must be positioned such that the entire danger zone is visible from this position. Furthermore, it must not be possible to operate the command device from inside the danger zone.
When the devices are installed, it must be ensured that they cannot be circumvented, e.g. by crawling under the bottom beam or climbing over and reaching over the top beam.
To this end, ISO 13855 and IEC 62046 recommend the following number of beams and beam heights for multiple light beam safety devices for access guarding:


Safety distance and beam heights for
multiple light beam safety devices for access guarding
Single light beam devices
Single light beam safety devices are used e.g.
- for safeguarding small slot-shaped openings (observe the detection capability as specified in IEC 62046, 6.1.2.3)
- at accessible openings with complicated contours (e.g. in front of rounded parts of the construction) in cases where multiple light beam devices cannot be used owing to the arrangement of the beam axes in a fixed housing
- as a stop photoelectric sensor on pallet conveyor lines in cases where the failure of the stop function results in a potential hazard (crushing)
- as an additional vertical safeguard next to the transport material at large openings with muting applications in cases where it is possible to enter the danger zone undetected between the transport material and the fixed construction of the machine during muting of the ESPE (EN 415-10, packaging machines)
An individual single light beam safety device is generally not suitable for access guarding because it is easy to crawl under and climb over. For optoelectronic access guarding, IEC 62046 requires that
- the distance between two beams does not exceed 500 mm
- Bottom beam is not higher than 300 mm above the reference plane
- the top beam is not lower than 900 mm above the reference plane
(Exception: 2-beam arrangement with bottom beam ≤ 400 mm, if the risk assessment permits this.)
If, due to design reasons, access guarding cannot be set up using a multiple light beam safety device, the above-mentioned requirements of IEC 62046 must be observed if several single light beam safety devices are used as an alternative.
Safety laser scanners
Due to their individually configurable protective fields, safety laser scanners can be used for many different applications. This enables flexible mounting positions for area guarding, access guarding or point of operation guarding. Thanks to their compact design, they are also suitable for use in mobile applications, e.g. on automated guided vehicles (AGVs).
A safety laser scanner, also referred to as AOPDDR (active opto-electronic protective device responsive to diffuse reflection), monitors the protected area by transmitting and receiving extremely short infrared laser pulses. If a laser pulse hits an object, it is reflected by the object and a distance value is determined by measuring the propagation time of the radiated light. At the same time, the optical system (i.e. a mirror) of the scanner rotates causing a surface to be scanned. In addition to the distance values, the determined measurement values of a scan also contain information about the angle and the signal strength. This information allows the size of the object and its position in space to be determined. Comparison with the parameters stored in the scanner decides whether the safety-related switching outputs (OSSDs) are switched off or whether the object can be ignored.
A major advantage of safety laser scanners is that they operate as a scanning system: transmitter and receiver are combined in one device. Unlike transmitter-receiver systems, e.g. safety light curtains, which consist of two devices, only one device is required. Furthermore, the detection capability (resolution) can be configured in several increments in a range from 30 mm to 150 mm.
Safety laser scanners have multiple configurable protective fields – our RSL 400 supports up to 100 protective fields, for example. They can be configured independently of each other and stored in the device. They are then selected depending on the respective situation via a safe control. This enables extremely flexible monitoring of the space concerned according to the current circumstances. Application examples are area guarding around moving machine parts, at robots or on automated guided vehicles (AGVs).
Stationary laser scanners with horizontal protective field arrangement (parallel approach)
Scanners are frequently used in applications where the protective field is aligned horizontally and persons approach parallel to it.
This type of application exists
- as pure stepping behind protection between a protective device with approach reaction (e.g. a vertically arranged light curtain) and a point of operation
- and as a combined protective device with approach and presence detection function.
Whereas the approach reaction requires a suitably short response time and therefore a low minimum distance to the point of operation, the response time for presence detection is not regulated normatively. A restart interlock is absolutely necessary if it is possible to leave the protective field by climbing onto machine parts.
The following calculation formula for the minimum distance and for the minimum length of the AOPDDR applies to optoelectronic protective device applications where the approach direction of the body part is parallel or at an angle up to 30° to the protective-field plane:
S [mm] = (1.6 mm/ms x T [ms]) + C [mm] with
C [mm] = (1200 mm – 0.4 x H [mm]); H ≤ 1000 mm; Cmin = 850 mm
The required detection capability d of the horizontally arranged AOPDDR is derived from the height of the scan level H as follows:
d [mm] = (H [mm] / 15) + 50 mm
A scan level of H = 300 mm, which is considered as not possible for a person to crawl under, thus gives a detection capability of the AOPDDR of 70 mm or less.
For danger zone guarding with parallel approach, reaching under and over is already implicitly taken into account.

In the case of safety laser scanners, IEC 61496-3 states that other additional distances have to be taken into account:
- ZSM for correction of the measurement error. This value is device-dependent and is given in the respective operating instructions. With the Leuze RSL 400 safety laser scanner, a ZSM of 100 mm applies for a protective field radius ≤ 6.25 m and a ZSM of 120 mm for a protective field radius > 6.25 m.
- ZREFL: Avoid using retro-reflectors in the beam plane beyond the protective field boundary. If this is not possible, an additional distance ZREFL of 100 mm must be added.
Note regarding use on automated guided vehicles:
In accordance with ISO 3691-4 "Industrial trucks – Safety requirements and verification – Part 4: Driverless industrial trucks and their systems", testing of the protective device must also take into consideration the most unfavorable conditions (e.g. load, inclination of the transportation path) in combination with the parameters specified for the truck. The size of the protective field can increase as a result of these requirements.
Safety radar system
Safety radar systems are used for 3D area monitoring. The radar principle is resistant to environmental influences such as dirt, dust, sawdust, smoke, oil, humidity and light, and thus ensures reliable operation of the systems. Safety radar systems are therefore particularly suitable for applications in harsh environments.
Operating principle
Radar sensors emit a continuous signal in the form of a three-dimensional cone, the frequency of which changes periodically (FMCW: frequency-modulated continuous wave). The signal is reflected by objects in the surrounding area. If an object moves, this leads to stretching or compression of the signal owing to the Doppler effect. The radar sensor uses this to determine the distance and speed of objects.
Whether or not a radar sensor detects an object depends on the radar cross section (RCS). It specifies how great the reflection of a radar wave through the object in the direction of the transmitter is. The radar cross section depends on the material, size and shape of the object. Metallic objects and water, for example, have a large radar cross section, whereas dry, non-metallic objects have a small radar cross section. We human beings largely consist of highly reflective water, which means that we have a significantly larger radar cross section than dry, non-metallic objects. The minimum radar cross section of a person is normatively defined and is 0.17 m2.
Accordingly, the sensors of the LBK radar system detect moving objects that have a radar cross section of at least 0.17 m2. They therefore detect persons reliably. If a person or an object in the protected area of the radar sensor moves, this causes the safety-related switching outputs (OSSDs) to switch off. Small contaminant particles in the air, however, are below the response threshold and are ignored. As the radar principle reacts only to movement, static objects in the protective field are permitted and do not lead to a shutdown.

The safety radar system detects persons reliably.
Static objects in the protected area do not lead to a shutdown because the radar principle reacts only to movement.
Area of application
The LBK safety radar system is suitable for the following safety applications with 3D area monitoring:
- Access guarding with combined presence control
- Stepping behind protection for an area, access to which is monitored using another protective device (e.g. a vertically arranged light curtain or a hard guard with door and safety switch)
Note: Safety radar systems detect a person's body. They are not suitable for detecting individual parts of the body, e.g. arms or legs.
Adaptation of detection area to application
Radar sensors monitor a three-dimensional area. The parameters "length" and "horizontal opening angle" are used to adapt the size of the monitored area flexibly to the application. The opening angle in the vertical direction is fixed and on our LBK radar sensor is 20 degrees.
To guard larger areas, up to 6 sensors can be combined in one application.
When setting up the protective fields, it is important to note that although radar waves cannot penetrate metallic objects, they can penetrate other objects to a greater or lesser extent. Areas behind an object that are not visible from the sensor, but still lie within the protective field are therefore also monitored. This means that the size of the protected areas always has to be adapted as well as possible to the size of the dangerous area that actually needs to be safeguarded.
Calculating the safety distance
For applications with the LBK safety radar system where a person approaches parallel or at an inclination of max. 30° to the central protected area plane, the following calculation formula is used to determine the minimum size of the protective field:
S [mm] = (1.6 mm/ms * T [ms]) + 850 mm

The protective field must be aligned such that it cannot be crawled under. To ensure this, the distance between the lower area of the three-dimensional protective field and the floor must not be greater than 300 mm.
For access guarding with parallel approach, reaching under and over is already implicitly taken into account.
Note:
The details for calculating the safety distance can differ depending on the used safety radar sensor. The formula above applies to our LBK SBV-01 sensor. Please observe the relevant information in the operating instructions for the used sensor.
Two-hand controls
ISO 13851 defines the following types of two-hand control devices:
- Type I: requires
- two independent control actuators (e.g. pushbuttons) that have to be operated simultaneously,
- and that both control actuators remain pressed during the dangerous situation,
- and that the dangerous process stops when one or both control actuators are released.
- Type II: requires in additional to Type I
- that both control actuators are released before a dangerous situation, e.g. a machine movement, can be initiated again.
- that both control actuators are released before a dangerous situation, e.g. a machine movement, can be initiated again.
- Type III: requires in addition to Type II
- that both control actuators are operated simultaneously within 0.5 seconds.
Type III two-hand control are divided into the following types depending on the design of the two control actuators:
- Type IIIA: Control actuators corresponding to Cat. 1 as per ISO 13849-1
- Type IIIB: Control actuators corresponding to Cat. 3 as per ISO 13849-1
- Type IIIC: Control actuators corresponding to Cat. 4 as per ISO 13849-1
- that both control actuators are operated simultaneously within 0.5 seconds.
| Requirements | Subsection | Type | ||||
| Ia | II | III | ||||
| A | B | C | ||||
| Use of both hands (simultaneous actuation) | 5.2 | X | X | X | X | X |
| Correlation between input signal and output signal | 5.3 | X | X | X | X | X |
| Termination of output signal | 5.4 | X | X | X | X | X |
| Prevention of inadvertent actuation | 5.5 | X | X | X | X | X |
| Prevention of circumvention | 5.6 | X | X | X | X | X |
| Regeneration of output signal | 5.7 | X | X | X | X | |
| Synchronous actuation | 5.8 | X | X | X | ||
| At least PL c (in acc. with ISO 13849-1) or SIL 1 (in acc. with IEC 62061) | X | X | ||||
| At least PL d with category 3 (in acc. with ISO 13849-1) or SIL 2 with HFT=a (in acc. with IEC 62061) | X | X | ||||
| Application of PL e with category 4 (in acc. with ISO 13849-1) or SIL 3 with HFT=1 (in acc. with IEC 62061) | X | |||||
| a If selection of a Type I two-hand control is considered, it is important to perform a thorough risk assessment to determine whether the synchronous actuation and output signal generation features can be disregarded. | ||||||
(source: ISO 13851)
The current state of the art means that a Type I two-hand control is unsuitable for initiating hazardous work processes.
Like optical protective devices, two-hand controls require a minimum distance to the point of operation in order to achieve the expected risk reduction. If the minimum distance is not observed, then this protective device must be regarded as easy to circumvent and thus partially ineffective with respect to its risk-reducing effect. For the safety distance between the two-hand control and the point of operation, the same formula applies as that used for determining the minimum distance of optical protective devices, because the two-hand control too is an electro-sensitive protective device.
In accordance with ISO 13855, the safety distance is determined from
S [mm] = (K [mm/ms] x T [ms]) + C [mm]
With
K = 1.6 mm/ms
C = 250 mm
and a minimum distance of 100 mm. If covers above both control actuators prevent penetration of hands into the danger zone during actuation, C = 0 is permitted.