








Approccio parallelo
Procedura guidata di calcolo conforme alla norma EN ISO 13855:2010
Le raccomandazioni di questa procedura guidata non hanno alcuna pretesa di essere complete. Per un uso e un'installazione sicuri e corretti dei prodotti, è necessario attenersi alle norme e ai regolamenti pertinenti nella versione attualmente in vigore. Leuze electronic GmbH + Co. KG non si assume alcuna responsabilità per i danni derivanti dall'uso di questa procedura guidata né per il corretto riferimento alle norme e alle direttive ivi richiamate.
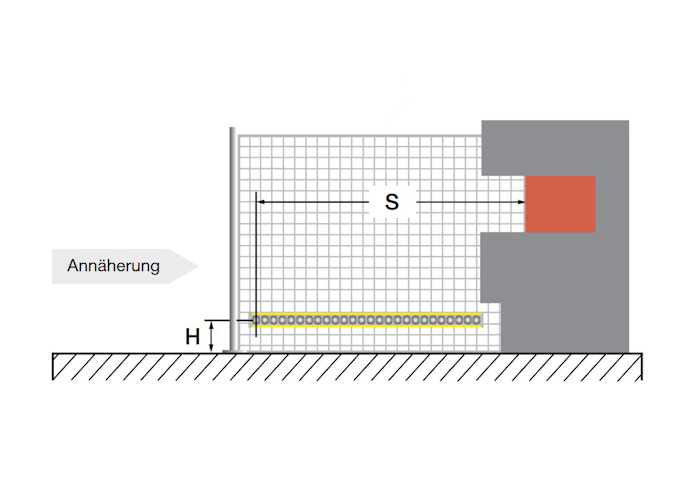
Calcolo della distanza minima per la protezione dell'area con approccio parallelo utilizzando un laser scanner di sicurezza.
 |
La distanza minima SRT viene calcolata con la seguente formula: S - Distanza minima tra la zona di pericolo e il punto di rilevamento C: = 1200 mm - 0,4 * H Z - Ulteriori distanze aggiuntive con i laser scanner di sicurezza |
Nel caso dei laser scanner di sicurezza, la norma IEC 61496-3 stabilisce che devono essere prese in considerazione distanze aggiuntive:
- ZSM per la correzione dell'errore di misurazione. Questo valore dipende dal dispositivo e viene indicato nelle rispettive istruzioni operative. Con il laser scanner di sicurezza Leuze RSL 400, si applica uno ZSM di 100 mm per un raggio di campo protetto ≤ 6,25 m e uno ZSM di 120 mm per un raggio di campo protetto > 6,25 m.
- ZREFL: Evitare l'uso di retroriflettori nel piano del raggio oltre il limite del campo protetto. Se non è possibile, è necessario aggiungere una distanza supplementare ZREFL di 100 mm.
Nota relativa all'utilizzo su veicoli a guida automatica:
in conformità alla norma EN ISO 3691-4 "Carrelli industriali - Requisiti di sicurezza e verifiche", il collaudo del dispositivo di protezione deve prendere in considerazione anche le condizioni più sfavorevoli (ad esempio, carico, inclinazione del percorso di trasporto) tenendo conto dei parametri tecnici del carrello interessato. Questi requisiti possono comportare l'aumento delle dimensioni del campo protetto.
Calcolo della distanza minima (distanza di sicurezza) per la protezione dell'area con approccio parallelo utilizzando una cortina fotoelettrica di sicurezza
 |
La distanza minima SRT viene calcolata utilizzando la seguente formula: S - Distanza minima tra la zona di pericolo e il punto di rilevamento C - Costanti di sicurezza per tenere conto della penetrazione nell'area pericolosa prima di attivare il dispositivo di protezione. C= 1200 mm - 0,4 * H, CMin = 850 mm H: Altezza del campo protetto sopra il piano di riferimento Risoluzione richiesta d con altezza di montaggio H: d [mm] ≤ (H/15) + 50 mm Nota: le altezze > 300 mm sono considerate come sufficienti per consentire a una persona di passarvi sotto strisciando. |