








Parallelle nadering
Berekeningsassistent volgens EN ISO 13855:2010
De aanbevelingen van deze assistent maken geen aanspraak op volledigheid. Voor een veilig en correct gebruik en installatie van de producten moeten de relevante normen en voorschriften in hun momenteel geldende versie worden gevolgd. Voor schade die ontstaat door het gebruik van deze assistent en voor de juistheid van de algemeen geldende normen en richtlijnen, aanvaardt Leuze electronic GmbH + Co. KG geen aansprakelijkheid.
Berekening van de minimumafstand voor gebiedsbewaking met parallelle nadering met een veiligheidslaserscanner
 |
De minimale afstand SRT wordt berekend met de volgende formule: S - Minimumafstand tussen de gevarenzone en het detectiepunt C: = 1200 mm - 0,4 * H Z - Verdere extra afstanden met veiligheidslaserscanners |
In het geval van veiligheidslaserscanners stelt IEC 61496-3 dat er rekening moet worden gehouden met extra afstanden:
- ZSM voor correctie van de meetfout. Deze waarde is afhankelijk van het apparaat en staat vermeld in de betreffende bedieningshandleiding. Bij de Leuze RSL 400 veiligheidslaserscanner geldt een ZSM van 100 mm voor een beschermingsveldstraal ≤ 6,25 m en een ZSM van 120 mm voor een beschermingsveldstraal > 6,25 m.
- ZREFL: Vermijd het gebruik van retroreflectoren in het bundelvlak voorbij de grens van het beschermende veld. Als dit niet mogelijk is, moet een extra afstand ZREFL van 100 mm worden toegevoegd.
Opmerking over het gebruik op onbemande transportsystemen:
In overeenstemming met EN ISO 3691-4 "Industriële trucks - Veiligheidseisen en verificatie", moet bij het testen van de beveiliging ook rekening worden gehouden met de meest ongunstige omstandigheden (bijv. belasting, helling van het transportpad) in combinatie met de voor de truck gespecificeerde parameters. Als gevolg van deze vereisten kan de grootte van het beschermingsveld toenemen.
Berekening van de minimumafstand (veiligheidsafstand) voor gebiedsbeveiliging met parallelle benadering met behulp van een veiligheidslichtscherm
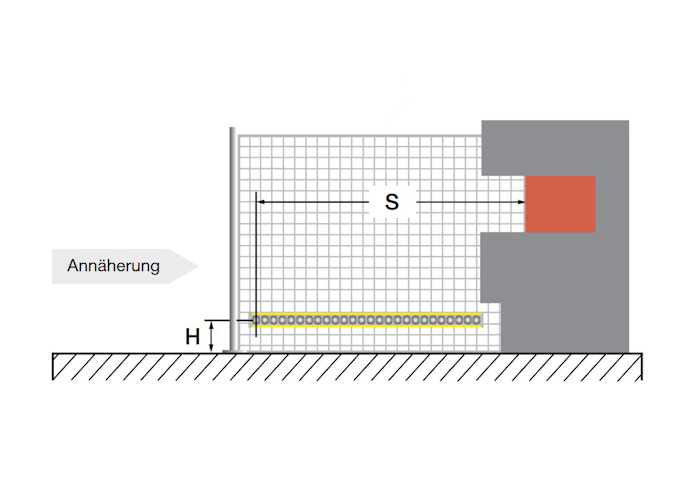 |
De minimale afstand SRT wordt berekend met de volgende formule: S - Minimumafstand tussen de gevarenzone en het detectiepunt C - Constanten met betrekking tot de veiligheid om rekening te houden met het binnendringen in de gevarenzone voordat de beveiligingsinrichting wordt geactiveerd. C = 1200 mm - 0,4 * H,CMin = 850 mm H: Hoogte beschermingsveld boven referentievlak Vereiste resolutie d met montagehoogte H: d [mm] ≤ (H/15) + 50 mm Opmerking: Hoogtes > 300 mm worden beschouwd als mogelijk voor een persoon om onderdoor te kruipen. |