








車体工程
何百もの部品が組み立てられて車体を形成します。
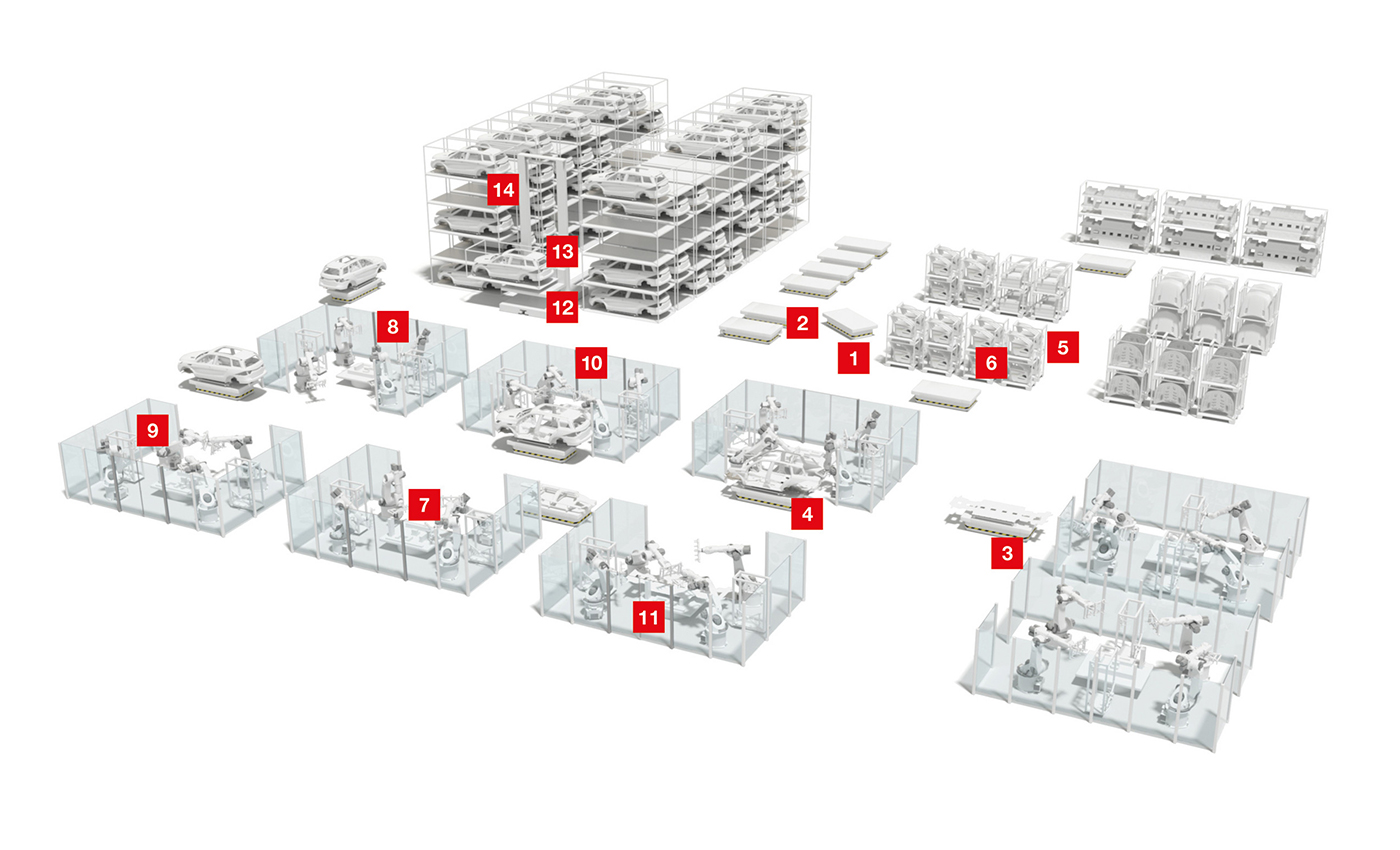
車体構築は、自動車製造の中で最も自動化された部分です。溶接、フランジ加工、レーザ加工、リベット留め、ネジ留め、そして最近では接着が代表的な作業工程です。ロボットセル、協働ロボット、スキッドやモノレールコンベアなどのコンベアシステムが工程を形作ります。
未来の工場は、さらに柔軟な製造コンセプトを特徴としています。多品種、ジャストインタイムの材料供給、ピーク需要の緩和が求められます。保管エリアと生産は分離され、組み立てはフレキシブルなセル構造で行われます。その間に、自動搬送車(AGV)が資材を運びます。
ロイツェのセンサは、車体工程の幅広い用途に使用されています。セーフティレーザスキャナはAGVを保護し、ナビゲーションのためのデータを提供します。位置決めおよび所在管理用のセンサは、スムーズなプロセスを保証し、セーフティセンサは機械の安全を保証します。

要件:
無人搬送システムは、セーフティセンサによって保護されなければなりません。保護エリアは、移動と積載状況に柔軟に対応する必要があります。ナチュラルナビゲーション原理を使用する場合、デバイスは同時にナビゲーションソフトウェアに測定データを提供する必要があります。
ソリューション:
RSL 400セーフティレーザスキャナは、安全技術と高品質測定値出力を1台で実現します。スキャン範囲は270°で、100組の可逆電極を備えています。そのため、2台のスキャナで無人搬送システムを最適にガードします。測定データの角度分解能は0.1°と高く、測定誤差も小さくなっています。

要件:
無人搬送システムは、周囲を安全かつ効率的に移動できなければなりません。しかし、多くの場合、広大な生産エリアや保管エリアが課題となります。さらに、多くのセンサは、その寸法のために車両に取り付けるには適していません。
ソリューション:
床に敷かれた高コントラストのトラックが無人搬送システムの走行ルートを定義します。OGS 600光学誘導センサは、エッジ検出を使用して走行ラインを検出し、車両のドライブに制御信号を送信します。床面からの最小距離はわずか10mmです。



要件:
生産工程を追跡するためには、SKID にエンコードされた情報を非接触で検出する必要があります。センサとSKID/無人搬送システム(AGV)の間には、無人搬送システム(AGV)の進路を妨げないように十分な距離を確保する必要があります。
ソリューション:
バーコードとRFID技術は、エンコードされた情報を読み取るのに適しています。バーコード技術は、読み取られたデータを中央データベースに転送します。しかし、分散型オートメーションでは、データの書き込みも必要です。RFID 技術は、RFM 32RFID 読み取り/書き込みシステム、または動作範囲が広い場合はRFM 62を使用します。



要件:
危険な動きをする範囲には、メンテナンスのために安全扉から入ることができます。扉を開けてもすぐに動きが止まらない場合は、ロック装置付きのセーフティスイッチで扉を警戒する必要があります。作業と安全の状況を知らせる必要があります。
ソリューション:
頑丈なセーフティスイッチLシリーズは、ロック装置付きで、電気信号によりアクセスが解除されるまで、安全扉を確実にロックします。このシリーズには、標準デザインと、改ざん防止に最適なRFIDコード化されたアクチュエータがあり、改ざんからの最適な保護が可能です。A7 シリーズの光学および音響信号器は、統合LEDステータス表示を補完します。

要件:
ロボットの危険エリアと搬送ステーションの作業エリアは、全工程において人の進入を防ぐ必要があります。車両は、作業エリアへの出入りが完全に自動でできる必要があります。
ソリューション:
ロボット/無人搬送システム用セーフティソリューションは、セーフティレーザスキャナにより搬送ステーション周辺全体を保護します。無人搬送システムが通過すると、保護エリアから無人搬送システムの輪郭がブランキングされ、保護エリアが動的に車両の位置に適応します。

要件:
品質と完全監視のために、形状や特徴を検出し、タスクに応じて公差、精度、寸法精度、完全性を確認します。座標とパラメーターの転送は、デジタル入出力またはシリアルインターフェースのいずれかで行います。
ソリューション:
LSIS 462iスマートカメラは、BLOB 解析やコード読み取りだけでなく、単一のユーザインターフェースで距離測定や幾何学形状(円、線、エッジ)の測定にも使用できます。自由にプログラム可能な8つの入出力と産業用イーサネットインターフェースが通信に利用可能です。

要件:
無人搬送システムが次の作業場に移動を開始する前に、無人搬送システム上の車体の存在と正しい位置決めが確認されなければなりません。これは、正確に定義された距離で車体の目立つ部分を検出することによって実行されます。
ソリューション:
HT 25Cシリーズのリーズナブルな背景抑制機能付き拡散型センサは、光沢のある素材でも信頼性高く検出が可能です。保護等級1の赤色光、赤外線、レーザを搭載したモデルや、さまざまな光点サイズにより、要件への最適な適合を可能にします。

要件:
スタッカクレーンまたはリフターは、X方向(移動軸)およびY方向(吊り上げ軸)に、移動先のパレットに適した位置に配置する必要があります。システムの高い可用性を確保するために、移動コマンドと位置決めデータは光学的に制御へ転送されます。
ソリューション:
AMS 300iレーザ距離測定デバイスまたはBPS 300iバーコード位置決めシステムは、正確な位置決めに使用されます。DDLS 500iデータ伝送光電センサは、AMS 300iデバイスの真横でオフセットなしに故障なく機能します。選択可能な動作範囲、インターフェース、プロトコルにより、最適なソリューションを提供します。

