








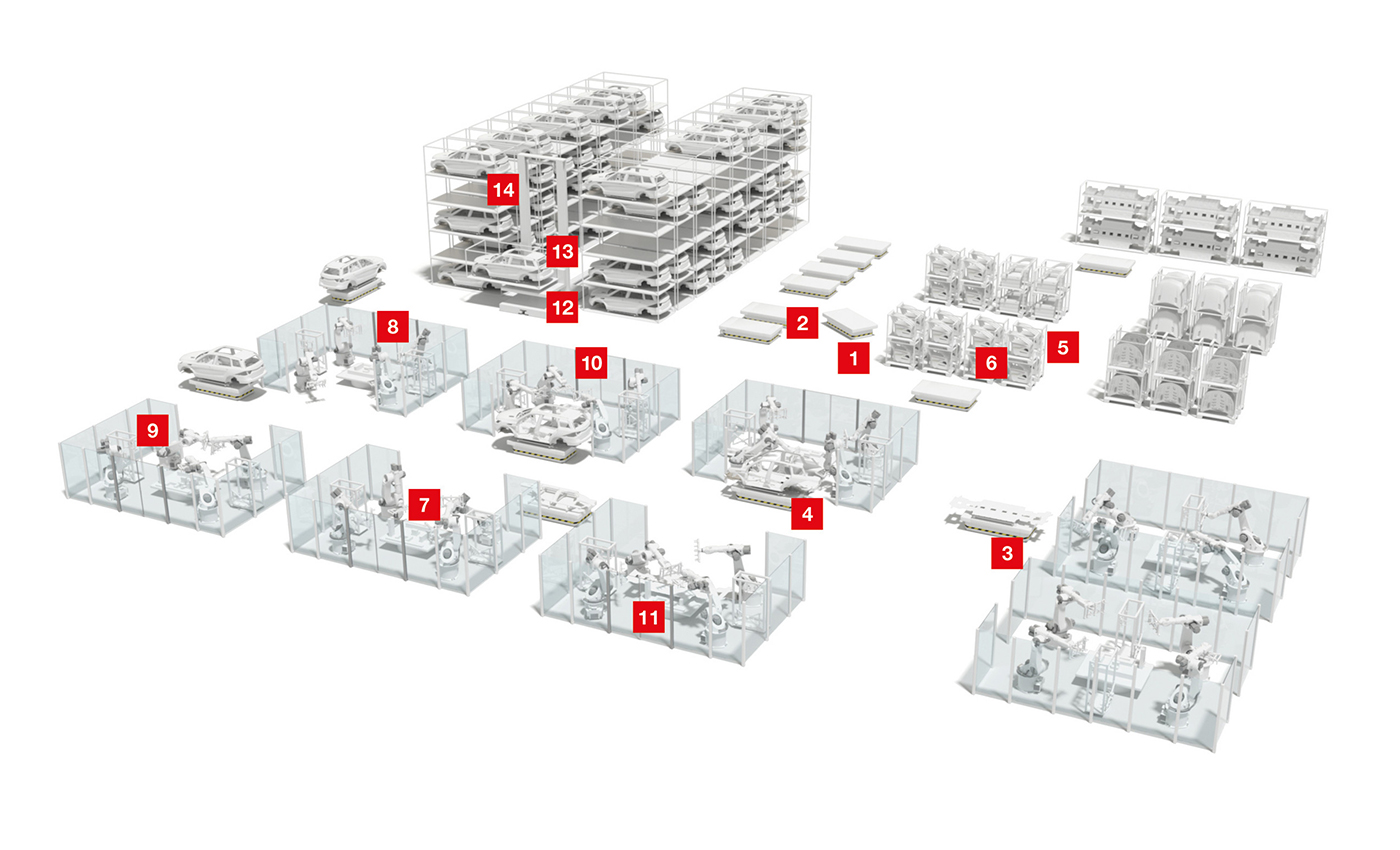
차체 제조 공정
수백 개의 개별 부품이 하나의 차체에 조립됩니다.
차체 제조는 자동차 생산에서 가장 자동화된 분야입니다. 일반적인 작업 공정에는 용접, 플랜징 및 레이저 절단뿐만 아니라 리벳팅 및 나사 고정 및 접착이 포함됩니다. 로봇 셀, 협업 로봇, 스키드 또는 텔퍼 라인과 같은 컨베이어 시스템이 프로세스를 결정합니다.
미래의 공장은 훨씬 더 유연한 생산 개념이 특징입니다. 매우 다양한 모델, 자재의 적시 공급 및 최대 활용도를 감당할 수 있는 능력이 필요합니다. 창고 영역과 생산이 분리되고 있습니다. 조립은 유연한 셀 구조에서 수행됩니다. 그 사이에서 무인 운반 시스템(AGV)이 자재 운송을 담당합니다.
차체 제조 공정에서 당사 센서의 적용 범위는 다양합니다. 안전 레이저 스캐너는 AGV를 보호하고 운행 경로 탐색 데이터를 제공합니다. 유무 감지 및 위치 컨트롤을 위한 센서는 원활한 프로세스를 보장하고 당사의 안전 센서는 필수적인 기계 안전을 보장합니다.

요건:
AGV의 운송 경로를 안전 센서로 보호해야 합니다. 또한 보호필드는 이동 및 적재 상황에 유연하게 적용되어야 합니다. Natural navigation 원리를 사용하는 경우 장치가 내비게이션 소프트웨어에 대한 측정 데이터를 동시에 제공해야 합니다.
솔루션:
RSL 400 안전 레이저 스캐너는 하나의 제품에 고품질의 측정값 출력 기능과 안전 보호 기술을 결합한 장치입니다. 이 스캐너는 270°까지의 넓은 스캔 각도와 100개까지의 전환 가능한 필드 페어가 있습니다. 따라서 2개의 스캐너로 AGV를 최적으로 보호할 수 있습니다. 측정 데이터는 0.1°의 해상도로 매우 정밀하며 오차 범위를 최소화합니다.

요건:
AGV이 공간 내에서 안전하고 효율적으로 이동해야 합니다. 그러나 광범위한 생산 및 창고 영역은 종종 문제를 야기합니다. 또한 많은 센서들이 크기 때문에 평면 차량에 부착하기에 적합하지 않습니다.
솔루션:
지면과 대비가 큰 트랙으로 AGV의 경로를 형성합니다. 광학 가이드 센서 OGS 600은 모서리 감지를 통해 트랙을 감지하고 차량의 구동장치에 제어 신호를 전송합니다. 지면과의 최소 간격은 10mm에 불과합니다.



요건:
스키드에 코딩된 정보를 생산 과정 추적을 위해 비접촉식으로 파악해야 합니다. 이때 AGV의 이동 경로에 방해가 되지 않도록 센서와 스키드/AGV 사이에 충분한 거리를 유지해야 합니다.
솔루션:
RFID코딩된 정보 판독에는 바코드 및 RFID 기술이 적합합니다. 바코드 기술은 판독한 데이터를 중앙 데이터베이스로 전달합니다. 분산형 자동화에는 데이터 기록 기능도 필요합니다. 여기에서는 RFID 기술이 사용됩니다. RFID 기록/판독 장치 RFM 32 또는 더 넓은 감지 범위의 경우 RFM 62가 사용됩니다.



요건:
위험한 동작이 있는 영역을 유지 보수 목적으로 출입하는 경우, 안전 도어를 통해 들어갈 수 있습니다. 도어를 열자 마자 동작이 멈추지 않으면 잠금장치가 있는 안전 스위치를 통해 도어를 보호해야 합니다. 작동 및 안전 상태를 알려야 합니다.
솔루션:
L 시리즈의 잠금장치가 있는 견고한 안전 스위치는 전기 신호를 통해 승인할 때까지 안전 도어를 잠급니다. 기본형 모델 외에도 통합 조작 버튼, 비상 정지 및 RFID 코딩 액추에이터가 있는 장치를 사용할 수 있습니다. A7 시리즈의 광학 및 청각 변환기는 통합 LED 상태 디스플레이를 보완합니다.

요건:
전체 공정 동안 로봇의 위험 영역과 이송 스테이션의 작업 영역에 작업자가 접근하지 못하도록 보호해야 합니다. 이때 차량은 전자동으로 작업 영역에 출입할 수 있어야 합니다.
솔루션:
로봇/AGV 이송 스테이션용 안전 솔루션은 안전 레이저 스캐너로 이송 스테이션의 전체 영역을 보호합니다. 차량 통행 시 보호필드에서 무인 차량 시스템의 윤곽을 제거하여 보호 필드가 차량의 위치에 동적으로 맞춰집니다.

요건:
품질 및 완전성 컨트롤을 위해 형태 또는 특징을 파악하고 적용 분야에 따라 공차, 정확성, 치수 정확성 및 완전성을 확인해야 합니다. 좌표 및 파라미터는 디지털 입력/출력 또는 시리얼 인터페이스를 통해 전송되어야 합니다.
솔루션:
스마트 카메라 LSIS 462i는 BLOB 분석 및 코드 판독 외에 사용자 인터페이스에서 원형, 선 및 모서리와 같은 기하학적 형태와 거리를 측정하는 기능도 제공합니다. 통신을 위해 자유롭게 프로그래밍 가능한 8개의 입력/출력과 1개의 산업용 이더넷 인터페이스를 사용할 수 있습니다.

요건:
AGV가 다음 작업 공간으로 이동할 수 있도록 AGV에 차체가 존재하는지와 올바르게 배치되었는지 여부를 확인해야 합니다. 이를 위해 차체를 정확하게 정의된 거리에서 감지해야 합니다.
솔루션:
HT 25C 시리즈의 비용 효율적인 배경 억제 확산 센서는 광택이 있는 자재에서도 높은 감지 신뢰성을 제공합니다. 보호 등급 1의 적색광, 적외선, 레이저가 사용되는 다양한 광점 크기의 모델을 요구사항에 맞게 최적으로 조정할 수 있습니다.

요건:
고층 창고 기계 또는 리프터가 접근할 팔레트에 맞는 x 방향(이송 축) 및 y 방향(리프팅 축)에 위치해야 합니다. 시스템의 높은 가용성을 보장하기 위해 이송 명령 및 위치 데이터가 광학 방식으로 컨트롤러에 전송되어야 합니다.
솔루션:
레이저 거리 측정기 AMS 300i 또는 바코드 위치 확인 시스템 BPS 300i 가 정확한 포지셔닝을 위해 사용됩니다. 데이터 전송 광모뎀 DDLS 500i는 AMS 300i 장치 바로 옆에서 오프셋 없이 작동합니다. 선택 가능한 감지 범위, 인터페이스 및 프로토콜이 최적의 솔루션을 보장합니다.

