








Soluções em sensores para shuttles
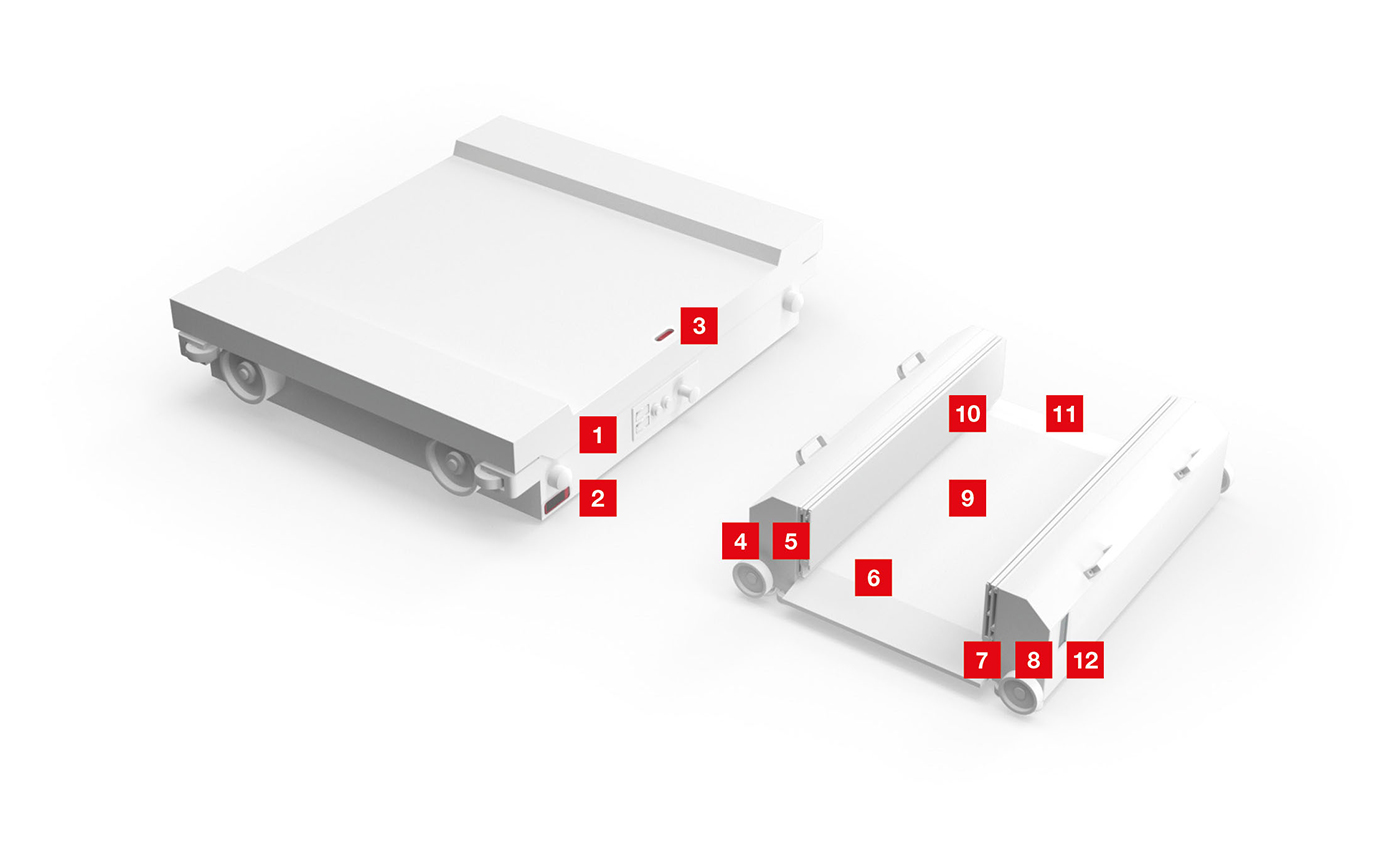
Shuttles são veículos de armazém compactos para a operação automática de armazéns de prateleiras. Eles são utilizados em paralelo e se movimentam de forma independente entre as prateleiras. Os shuttles dinâmicos devem transportar a mercadoria em segurança, detectar espaços livres de maneira confiável e evitar colisões.
Nossos sensores são otimizados para esta área de aplicação e assumem tarefas no posicionamento preciso nos compartimentos, no controle de ocupação de prateleiras e no controle de presença. Sensores de chaveamento com ciclo de milissegundos garantem o posicionamento ideal. Nossos sensores compactos também podem ser integrados facilmente em veículos baixos, permitindo um design flexível. Todos os nossos sensores são concebidos para uma utilização fácil e garantem uma montagem e comissionamento rápidos.
[01] Posicionamento do palete

Exigência:
Para garantir uma distância definida entre os paletes, a distância entre o shuttle e o palete armazenado deve ser determinada com precisão, independentemente de superfícies, cores ou ângulos.
Solução:
Os sensores de distância de medição ou chaveamento ODS 110 e HT 110 determinam a distância em relação a um alvo não cooperante e disponibilizam a informação como valor de medição ou na saída de chaveamento. Com um alcance de até 5.000 mm, os dispositivos oferecem uma precisão típica de ±15 mm.
[02] Posicionamento do shuttle no fim do corredor

Exigência:
O primeiro palete em um corredor deve ser sempre colocado a uma distância definida em relação ao fim do corredor. Para isso, é necessário determinar a posição do shuttle no fim do corredor.
Solução:
Os sensores de distância de medição ou chaveamento ODS 110 / HT 110 funcionam de acordo com o método de tempo de voo do pulso (TOF, Time of Flight) e oferecem resultados confiáveis com quaisquer materiais ao longo de distâncias de até 3 m. Todos os dispositivos dispõem de uma interface IO-Link. No caso do HT 110, é possível definir duas saídas de chaveamento independentemente da posição.
[03] Controle de presença/controle de posição do palete

Exigência:
Após a transferência do palete para o shuttle, deve-se verificar se o palete foi colocado corretamente. Para isso, a presença do palete no shuttle deve ser verificada em uma ou várias posições definidas.
Solução:
Com a supressão de fundo ativa e a resistência à luz ambiente, os sensores óticos HT 3C detectam paletes de maneira confiável. A série HT 3C oferece soluções robustas, por exemplo, para a detecção de objetos com estruturas coloridas, objetos com aberturas ou superfícies com polimento de alto brilho.
[04] Proteção anticolisão

Exigência:
Quando vários shuttles se movimentam em um nível, deve-se verificar se o trajeto está livre, se outro shuttle se encontra nas proximidades ou se o fim do corredor foi atingido.
Solução:
O sensor de distância ODS 10 mede a distância em relação a um alvo não cooperante de qualquer material. A distâncias de até 8 m, os dispositivos fornecem resultados confiáveis com uma precisão típica de ±15 mm.
[05] Referenciação

Exigência:
Para impedir o deslizamento, uma posição deve ser referenciada ao final do trajeto ou na estação de transferência dos recipientes. Para a referenciação exata, os sensores utilizados devem dispor de um ponto de chaveamento preciso e reproduzível.
Solução:
Os sensores óticos PRK 3C funcionam de acordo com o princípio de reflexão. Versões especiais com elevada frequência de chaveamento e ponto de luz pequeno garantem um ponto de chaveamento exato.
[06] Verificação de saliências e bordas

Exigência:
Antes de o shuttle começar a se movimentar, é necessário verificar se a carga foi completamente carregada ou descarregada e se não existe nenhuma saliência.
Solução:
Com seu modelo cúbico compacto, os sensores óticos da série 5 são utilizados para tarefas padrão de detecção de alto rendimento e relação custo-benefício otimizada. As mangas roscadas metálicas M3 integradas e a saída de cabo flexível para baixo ou para trás facilitam a montagem mesmo em situações de montagem em espaços confinados.
[07] Controle de ocupação de prateleiras – profundidade simples

Exigência:
Antes de poder armazenar um recipiente ou caixa, deve-se verificar se o compartimento está livre.
Solução:
Os sensores de detecção da série 3C detectam objetos contra o plano de fundo de maneira confiável. Objetos com estruturas coloridas também são detectados de maneira confiável.
[08] Controle de ocupação de prateleiras – várias profundidades

Exigência:
Antes de poder armazenar um recipiente ou caixa, deve-se verificar se o compartimento está livre.
Solução:
Os sensores de detecção da série 25C detectam objetos contra um plano de fundo de maneira confiável. Objetos com estruturas coloridas também são detectados de maneira confiável. A variante Long Range de alto desempenho está disponível para aplicações com alcances acima de 2 m.
[09] Controle da posição do recipiente no shuttle

Exigência:
É necessário determinar em qual área do shuttle um recipiente ou caixa se encontra.
Solução:
Com seu modelo cúbico compacto, os sensores óticos da série 5 são utilizados para tarefas padrão de detecção de alto rendimento e relação custo-benefício otimizada. As mangas roscadas metálicas M3 integradas e a saída de cabo flexível para baixo ou para trás facilitam a montagem mesmo em situações de montagem em espaços confinados.
[10] Detecção da posição final do dedo

Exigência:
Para o processo correto de armazenamento e retirada, é necessário verificar a posição final do dedo.
Solução:
Os sensores indutivos da série IS 208 detectam objetos metálicos de maneira confiável. Com apenas 8 mm de diâmetro e carcaça de metal robusta, os pequenos dispositivos padrão podem ser integrados no shuttle de maneira fácil e individual.
[11] Detecção da posição final da forquilha telescópica

Exigência:
Antes de o shuttle se movimentar, é necessário garantir que a forquilha telescópica esteja completamente retraída. Para isso, é preciso verificar a posição final da forquilha telescópica.
Solução:
Estes sensores indutivos da série IS 288 podem ser utilizados para diferentes tarefas de detecção. Os dispositivos com modelos cúbicos estão disponíveis com carcaça de plástico e metal. Com seu campo de detecção alinhado lateralmente, é possível uma integração econômica e que ocupa pouco espaço.
[12] Posicionamento preciso nos compartimentos

Exigência:
Marcações de orifícios são feitas no trilho de deslocamento para o posicionamento preciso do shuttle. Estas marcações devem ser detectadas de maneira reproduzível.
Solução:
Os potentes sensores fotoelétricos difusos com supressão de fundo da série 3C detectam objetos contra os mais diversos planos de fundo de maneira confiável. Variantes com luz laser estão disponíveis para tarefas de posicionamento especialmente precisas e rápidas.