








Mekik için sensör çözümleri
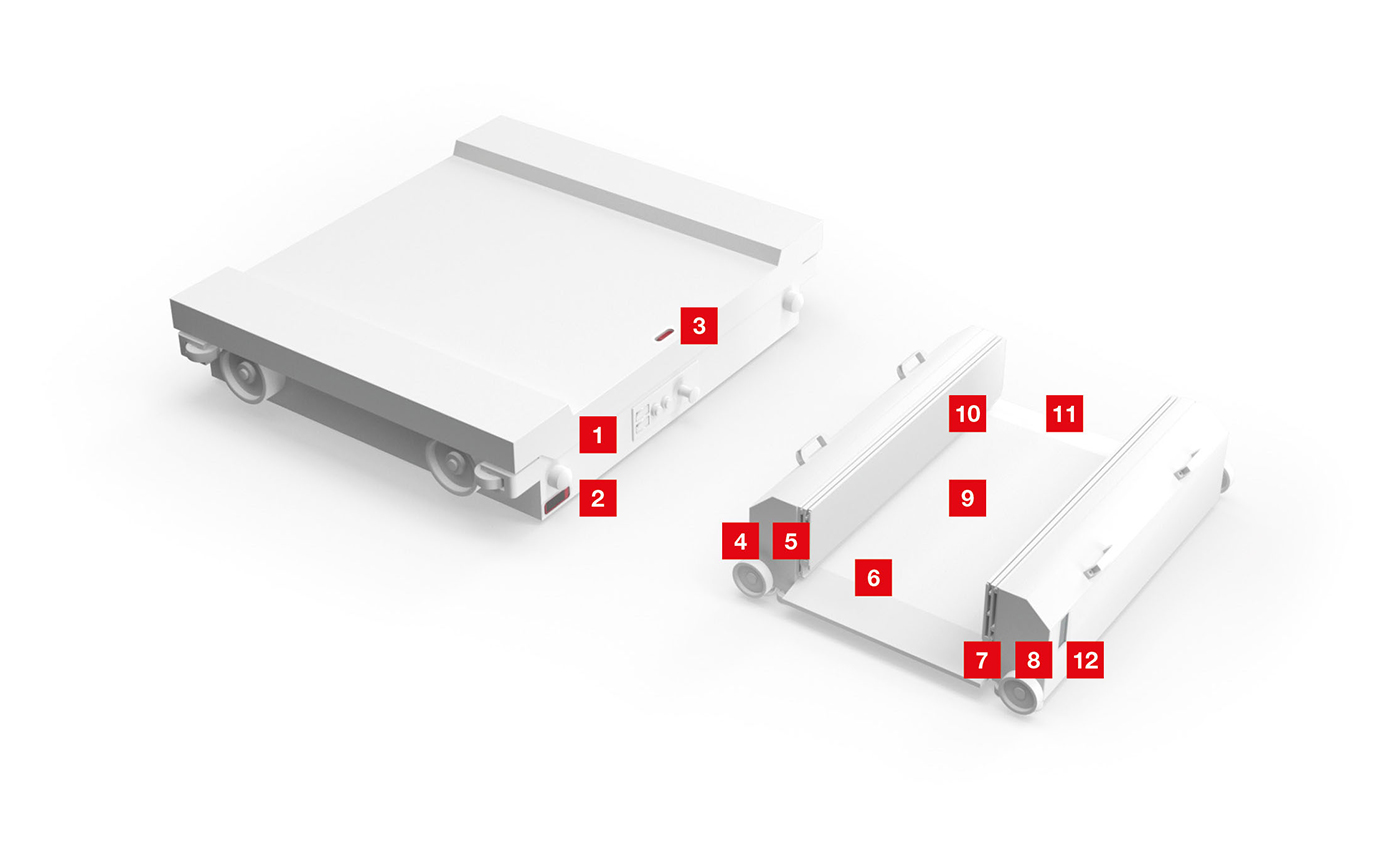
Mekikler raflı depolarda otomatik kullanım için kompakt depolama araçlarıdır. Paralel olarak kullanılırlar ve raf iskeletinde büyük ölçüde bağımsız hareket ederler. Dinamik mekikler, malların güvenli bir şekilde taşınması, açık alanların güvenilir bir şekilde belirlenmesi ve çarpışmaları önlenmesi ile görevlendirilmiştir.
Sensörlerimiz bu kullanım alanına uygun hale getirilmiştir ve raf hassas konumlandırması, raf doluluk kontrolü ve var-yok kontrolü görevlerini gerçekleştirmektedir. Milisaniye çevriminde anahtarlamalı sensörlerimiz konumlandırmanın en iyi şekilde yapılmasını mümkün kılarlar. Yer tasarrufu sunan sensörlerimiz alçak araçlara bile kolayca entegre edilebilir ve bu şekilde esnek bir tasarım imkânı sunarlar. Tüm sensörlerimiz kullanıcı dostu şekilde tasarlanmışlardır ve bu sayede hızlı montaj ve devreye alma sağlarlar.
[01] Paletin konumlandırılması

Gereksinim:
Paletler arasında belirlenmiş bir mesafenin korunabilmesi için mekik ile yerleştirilen palet arasındaki mesafenin, yüzey, renk veya açıdan bağımsız bir şekilde hassas olarak belirlenmesi gerekir.
Çözüm:
Ölçüm yapan veya anahtarlamalı ODS 110 ve HT 110 mesafe sensörleri önceden belirlenmemiş bir hedefe doğru olan mesafeyi belirlerler ve bu bilgiyi ölçüm değeri veya anahtarlama çıkışı olarak kullanıma sunarlar. 5.000 mm’ye kadar olan çalışma mesafesinde cihazlar tip. ±15 mm hassasiyet sunarlar.
[02] Mekiğin koridorun sonundaki konumlandırılması

Gereksinim:
Koridordaki ilk palet her zaman belirlenmiş bir mesafede koridorun sonuna yerleştirilmelidir. Bunun için mekiğin koridorun sonundaki konumu belirlenmelidir.
Çözüm:
Ölçüm yapan ve anahtarlamalı ODS 110 / HT 110 mesafe sensörleri, uçuş zamanı (TOF) prensibine göre çalışır ve 3 m’ye kadar olan mesafelerde ve her tür malzemede güvenilir sonuçlar sunar. Tüm cihazlarda IO-Link arayüzü bulunur. HT 110’da istenen noktalara iki adet anahtarlama çıkışı yerleştirilebilir.
[03] Paletlerin var-yok ve pozisyon kontrolü

Gereksinim:
Paletler mekik üzerine alınmadan önce paletin doğru yerleştirildiği kontrol edilmelidir. Bunun için mekik üzerinde önceden belirlenmiş bir veya daha fazla konumda var-yok kontrolü gerçekleştirilmelidir.
Çözüm:
HT 3C optik sensörler aktif arka plan bastırması ve ortam ışığı bastırması ile paletleri güvenilir bir şekilde tespit ederler. HT 3C serisi, renkli nesneler, delikli nesneler ve çok parlak yüzeylerin algılanması dahil olmak üzere etkili çözümler sunar.
[04] Çarpışma emniyeti

Gereksinim:
Birden fazla mekik aynı düzlemde hareket ettiğinde, hareket yolunun boş olup olmadığı, yakında başka bir mekiğin olup olmadığı veya koridorun sonuna ulaşılıp ulaşılmadığı kontrol edilmelidir.
Çözüm:
ODS 10 mesafe sensörü, herhangi bir malzemeden önceden belirlenmemiş bir hedefe doğru olan mesafeyi ölçer. 8 m’ye varan mesafelerde cihazlar tip. ±15 mm hassasiyetinde güvenilir sonuçlar sunarlar.
[05] Referanslama

Gereksinim:
Kaymanın engellenmesi için konteynerin hareket yolunun veya aktarım istasyonunun bir pozisyona referanslanması gerekir. Kesin bir referanslama için kullanılan sensörler hassas ve sürdürülebilir anahtarlama noktasına sahip olmalıdırlar.
Çözüm:
PRK 3C optik sensörler yansıma prensibine göre çalışırlar. Yüksek anahtarlama frekansı ve düşük ışık spotuna sahip özel versiyonlar sayesinde kesin bir anahtarlama noktası elde edilir.
[06] Çıkıntı ve sarkma denetimi

Gereksinim:
Mekik harekete geçmeden önce yükün tamamen aldındığı veya boşaltıldığı kontrol edilmeli ve herhangi bir çıkıntı olmadığından emin olunmalıdır.
Çözüm:
5 serisi optik sensörler kompakt ve kübik yapı şekilleriyle, verimli ve maliyeti uygun standart algılama görevlerinde kullanılabilirler. Entegre M3 metal yuvalar, aşağı veya arkaya doğru esnek kablo çıkışları sayesinde dar yerlerde bile kolay bir montaj imkânı sunar.
[07] Raf doluluk kontrolü - tek derinlik

Gereksinim:
Bir konteyner veya karton depolanmadan önce yerin boş olduğu kontrol edilmelidir.
Çözüm:
3C serisi anahtarlamalı sensörler arka planın önündeki nesneleri güvenilir bir şekilde tespit ederler. Renkli ve şekilli nesneler de güvenilir şekilde algılanırlar.
[08] Raf doluluk kontrolü - çoklu derinlik

Gereksinim:
Bir konteyner veya karton depolanmadan önce yerin boş olduğu kontrol edilmelidir.
Çözüm:
25C serisi anahtarlamalı sensörler arka planın önündeki nesneleri güvenilir şekilde tespit ederler. Renkli ve şekilli nesneler de güvenilir şekilde algılanırlar. 2 metrenin üzerindeki çalışma mesafesine sahip uygulamalarda yüksek verimli uzun menzil (Long-Range) modeller mevcuttur.
[09] Mekikteki konteyner pozisyonunun denetimi

Gereksinim:
Konteynerin veya kartonun mekiğin hangi bölgesinde bulunduğu belirlenmelidir.
Çözüm:
5 serisi optik sensörler kompakt ve kübik yapı şekilleriyle, verimli ve maliyeti uygun standart algılama görevlerinde kullanılabilirler. Entegre M3 metal yuvalar, aşağı veya arkaya doğru esnek kablo çıkışları sayesinde dar yerlerde bile kolay bir montaj imkânı sunar.
[10] Parmağın son konumunun tespit edilmesi

Gereksinim:
Depolama ve boşaltma sürecinin doğru şekilde yürütülebilmesi için parmağın son konumu tespit edilmelidir.
Çözüm:
IS 208 serisi endüktif sensörler metal nesneleri güvenilir bir şekilde tespit ederler. Sadece 8 mm çapa ve sağlam metal muhafazaya sahip küçük standart cihazlar kolay ve özgün bir şekilde mekiğe entegre edilebilirler.
[11] Teleskop çatalının son konumunun tespit edilmesi

Gereksinim:
Mekik hareket etmeden önce teleskop çatalının tamamen içeri sürülüp sürülmediğinden emin olunmalıdır. Bunun için teleskop çatalının son konumu kontrol edilmelidir.
Çözüm:
IS 288 serisi bu endüktif sensörler farklı algılama görevlerinde kullanılabilirler. Kübik yapı şekline sahip cihazlar plastik ve metal muhafaza içerisinde temin edilebilirler. Yana doğru hizalanmış sensör alanlarıyla yer ve maliyet tasarrufu sağlayan bir entegrasyon mümkündür.
[12] Raf hassas konumlandırma

Gereksinim:
Mekiğin kesin bir şekilde konumlandırılması için hareket rayında delik işaretleri bulunmaktadır. Bunların her seferinde yeniden algılanması öngörülmüştür.
Çözüm:
3C serisi iletken arka plan bastırmalı ışık sensörleri çok çeşitli arka planlarda bile nesneleri güvenilir bir şekilde tespit ederler. Çok daha hassas ve hızlı bir konumlandırma görevleri için modellerde lazer ışık bulunmaktadır.