








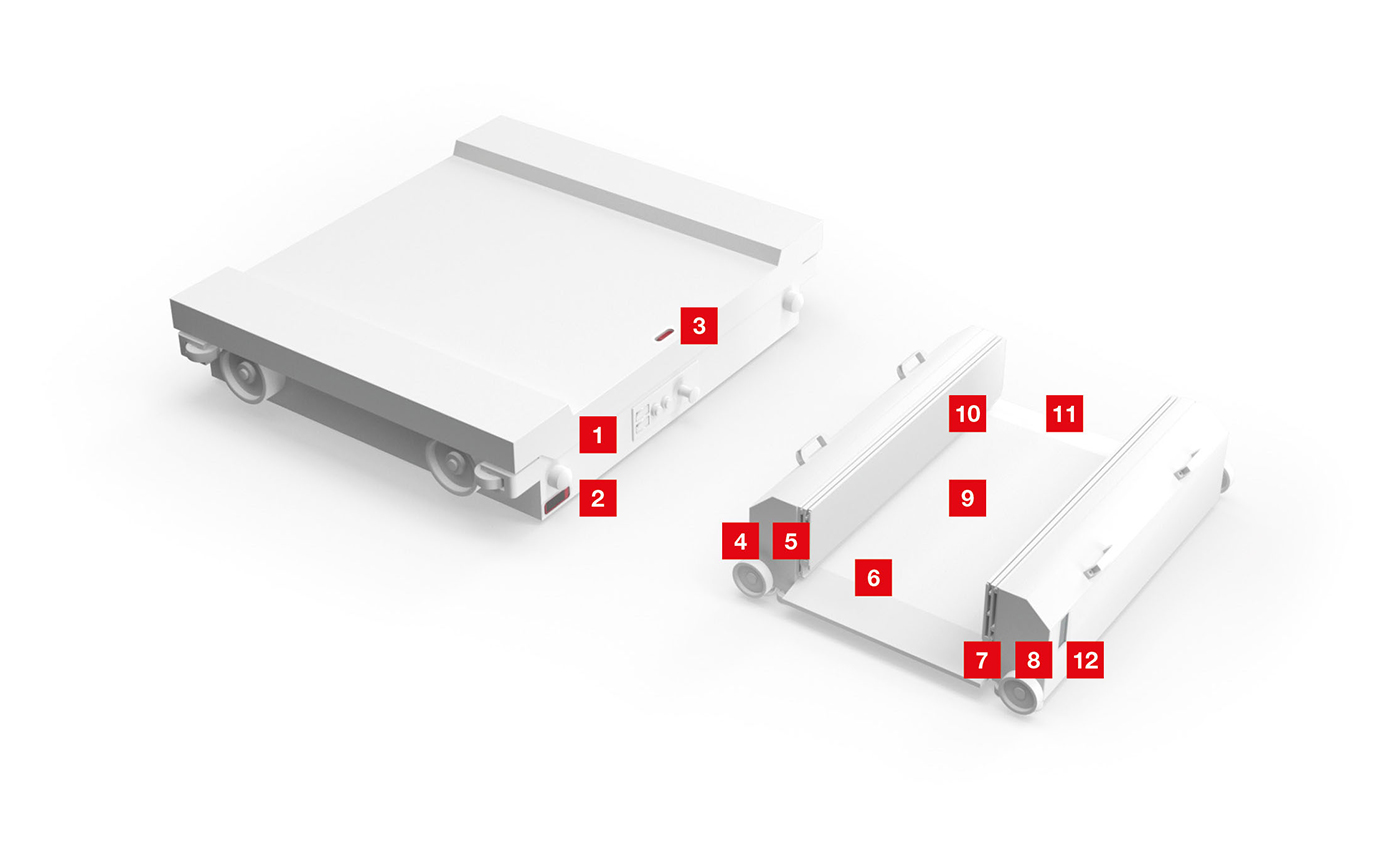
Applicazioni di sensori per navette
Le navette sono veicoli da magazzino compatti per il funzionamento automatico dei sistemi di scaffalatura. Sono impiegate parallelamente e si muovono tra le scaffalature per lo più in maniera indipendente. Queste navette dinamiche devono trasportare la merce in modo sicuro, riconoscere affidabilmente gli spazi liberi ed evitare le collisioni.
I nostri sensori sono ottimizzati per questo campo di impiego e svolgono compiti di posizionamento preciso delle forche telescopiche, di controllo comparto vani e di controllo presenza. I sensori di commutazione con cadenza di millisecondi assicurano un posizionamento ottimale. I nostri sensori salva-spazio si integrano perfettamente anche nei veicoli bassi, consentendo un design flessibile. Tutti i nostri sensori sono concepiti per essere facili da usare e infatti garantiscono un montaggio e una messa in opera rapidi.
[01] Posizionamento del pallet

Richiesta:
Per garantire una determinata distanza fra i pallet, occorre stabilire con precisione la distanza fra la navetta e il pallet stoccato indipendentemente da superfici, colori o angoli.
Soluzione:
I sensori della distanza a commutazione o di misura ODS 110 e HT 110 determinano la distanza rispetto a un obiettivo non cooperante e forniscono l'informazione sotto forma di valore di misura o di uscita di commutazione. In caso di portata fino a 5.000 mm, questi dispositivi forniscono una precisione tipica di ±15 mm.
[02] Posizionamento della navetta a fine corridoio

Richiesta:
Il primo pallet di un corridoio deve essere depositato sempre a una distanza definita rispetto alla fine del corridoio. A tale scopo va determinata la posizione della navetta a fine corridoio.
Soluzione:
I sensori della distanza a commutazione o di misura ODS 110 / HT 110 funzionano in base al principio della misura del tempo di propagazione degli impulsi (TOF) e forniscono risultati affidabili su distanze fino a 3 m con qualsiasi materiale. Tutti i dispositivi sono dotati di un'interfaccia IO-Link. Nel caso del sensore HT 110 è possibile impostare due uscite di commutazione indipendenti dalla posizione.
[03] Controllo di presenza / posizione del pallet

Richiesta:
Dopo il trasbordo del pallet sulla navetta è necessario controllare se il pallet vi sia stato posizionato correttamente. A tale scopo, occorre controllare la presenza del pallet in una o più posizioni definite sulla navetta.
Soluzione:
I sensori ottici HT 3C rilevano i pallet in modo affidabile grazie alla soppressione attiva dello sfondo e alla stabilità alla luce ambiente. La serie HT 3C offre soluzioni solide, ad es. per il riconoscimento di oggetti dalla struttura colorata, con aperture o con superfici estremamente lucide.
[04] Protezione anticollisione

Richiesta:
Quando più navette si spostano sullo stesso piano, occorre controllare se il percorso di trasporto sia libero, se nelle vicinanze sia presente un'altra navetta o se invece sia stata raggiunta la fine della corsia.
Soluzione:
Il sensore della distanza ODS 10 misura la distanza rispetto a un obiettivo non cooperante di qualunque materiale. Su distanze fino a 8 m, i dispositivi forniscono risultati affidabili con una precisione tipica di ±15 mm.
[05] Referenziamento

Richiesta:
Per contrastare lo slittamento, il contenitore deve essere referenziato su una posizione alla fine del percorso di trasporto o in corrispondenza di una stazione di trasferimento. Per il referenziamento esatto, i sensori utilizzati devono essere dotati di un punto di commutazione preciso e riproducibile.
Soluzione:
I sensori ottici PRK 3C funzionano secondo il principio di riflessione. I modelli speciali con elevata frequenza di commutazione e spot luminoso piccolo assicurano un punto di commutazione preciso.
[06] Controllo di sporgenze e sbalzi

Richiesta:
Prima che la navetta si metta in movimento è necessario controllare che il carico sia stato completamente prelevato o scaricato e che non vi siano sporgenze.
Soluzione:
Grazie alla loro forma cubica compatta, i sensori ottici della serie 5 sono ideali per compiti di rilevamento standard ad alte prestazioni e dai costi ottimizzati. Le bussole filettate di metallo M3 integrate e l'uscita del cavo flessibile sul lato inferiore o posteriore facilitano il montaggio anche in condizioni di installazione in spazi ridotti.
[07] Controllo comparto vani - a profondità singola

Richiesta:
Prima che un contenitore o un cartone possa essere stoccato, è necessario verificare se lo spazio sia libero.
Soluzione:
I sensori a tasteggio della serie 3C rilevano gli oggetti in modo affidabile davanti a uno sfondo. Vengono rilevati affidabilmente anche gli oggetti dalla struttura colorata.
[08] Controllo comparto vani - a profondità multipla

Richiesta:
Prima che un contenitore o un cartone possa essere stoccato, è necessario verificare se lo spazio sia libero.
Soluzione:
I sensori a tasteggio della serie 25C rilevano gli oggetti in modo affidabile davanti a uno sfondo. Vengono rilevati affidabilmente anche gli oggetti dalla struttura colorata. Per applicazioni con portate oltre 2 m è disponibile la variante Long Range particolarmente potente.
[09] Controllo della posizione del contenitore sulla navetta/h2>

Richiesta:
È necessario stabilire quale sia l'area della navetta in cui si trova un contenitore o un cartone.
Soluzione:
Grazie alla loro forma cubica compatta, i sensori ottici della serie 5 sono ideali per compiti di rilevamento standard ad alte prestazioni e dai costi ottimizzati. Le bussole filettate di metallo M3 integrate e l'uscita del cavo flessibile sul lato inferiore o posteriore facilitano il montaggio anche in condizioni di installazione in spazi ridotti.
[10] Riconoscimento della posizione finale del dito

Richiesta:
Per lo svolgimento corretto dello stoccaggio e del recupero è necessario controllare la posizione finale del dito.
Soluzione:
I sensori induttivi della serie IS 208 riconoscono in modo affidabile gli oggetti metallici. Questi piccoli dispositivi standard con diametro di soli 8 mm e alloggiamento di metallo robusto sono integrabili nella navetta in modo semplice e personalizzato.
[11] Riconoscimento della posizione finale della forca telescopica

Richiesta:
Prima che la navetta si muova, bisogna assicurarsi che la forca telescopica sia completamente rientrata. A tale scopo va verificata la posizione finale della forca telescopica.
Soluzione:
Questi sensori induttivi della serie IS 288 sono utilizzabili per svariati compiti di rilevamento. I dispositivi con forma cubica sono disponibili con alloggiamento di plastica e di metallo. Il campo di riconoscimento orientato lateralmente permette un'integrazione meno ingombrante e più economica.
[12] Posizionamento preciso delle forche telescopiche

Richiesta:
Per il posizionamento preciso della navetta sono presenti marcature forate nella guida di scorrimento. Queste devono essere riconosciute in modo riproducibile.
Soluzione:
Le potenti fotocellule a tasteggio con soppressione dello sfondo della serie 3C riconoscono in modo affidabile gli oggetti sui più svariati sfondi. Per compiti di posizionamento particolarmente precisi e rapidi sono disponibili varianti con luce laser.