








직각 접근
EN ISO 13855:2010에 따른 안전거리 계산기
본 도구의 권장 사항이 모든 상황을 포괄하는 것은 아닙니다. 제품의 안전하고 올바른 사용 및 설치를 위해서는 최신 유효 기준의 관련 표준 및 규정을 반드시 준수해야 합니다. Leuze electronic GmbH + Co. KG는 본 도구 사용으로 인해 발생하는 손해 또는 일반적으로 적용되는 표준 및 지침의 정확성에 대해 어떠한 책임도 지지 않습니다.
직각 접근 및 분해능 ≤ 40mm 조건에서의 최소 거리 계산
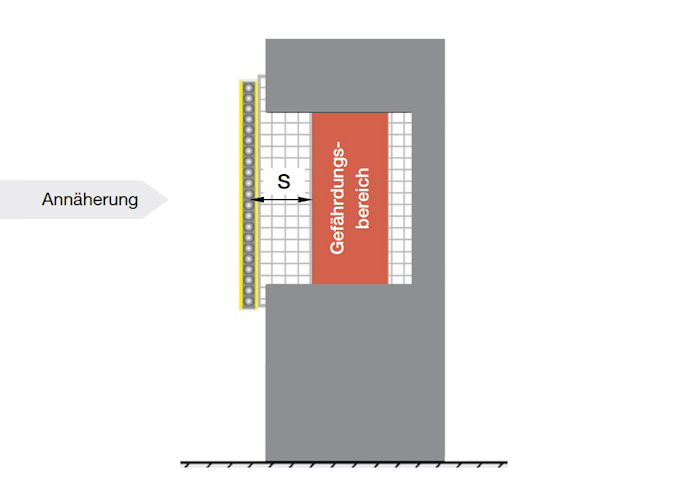 |
최소 거리 SRT는 다음 공식에 따라 계산됩니다: SRT – 보호 영역과 작업 지점 간의 최소 거리 |
참고: 또한 겹침이 가능한 경우, CRO(겹침)에 대한 표 값을 추가로 산정해야 합니다. CRO > CRT인 경우, 최소 거리를 산정할 때 CRT 대신 CRO 값을 사용해야 합니다.
초기 계산에서는 K 값으로 2.0mm/ms를 사용합니다. 계산 결과 SRT > 500mm인 경우, K = 1.6mm/ms로 다시 계산할 수 있습니다. 두 번째 단계에서 산출된 SRT 값은 최소 500mm 이상이어야 합니다(계산된 값이 이보다 낮을 경우, SRT는 500 mm로 설정합니다).
주의: 계산 결과가 더 낮더라도, 작업 지점까지의 거리 S는 항상 최소 100mm 이상이어야 합니다.
직각 접근 및 분해능 > 40mm 조건에서의 최소 거리 계산
참고: 이 공식은 멀티 라이트빔 안전 센서, 안전 라이트 커튼 및 해당 분해능을 갖춘 안전 레이저 스캐너에 적용됩니다.
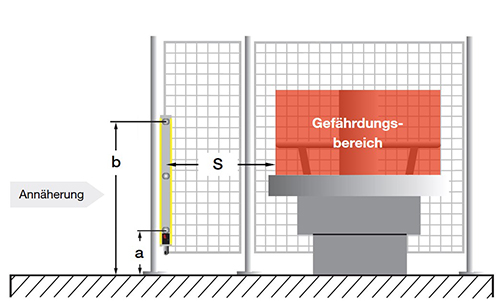 |
최소 거리 SRT는 다음 공식에 따라 계산됩니다: SRT – 보호 영역과 작업 지점 간의 최소 거리 K – 접근 속도: 1,6mm/ms |
S: 최소 거리
a: 기준면으로부터 하부 빔의 높이
b: 기준면으로부터 상부 빔의 높이
참고: CRO(상부 접근)에 대한 표 값도 함께 산정해야 합니다. 일반적으로 이 값은 850mm보다 크며, 이 경우 공식에서 850mm 대신 해당 값을 사용해야 합니다!
|
|
|
|||||||||||
|
위험 |
전기 감응식 보호 장치의 보호 영역 상단 가장자리 높이 |
|||||||||||
| 900 | 1 000 | 1 100 | 1 200 | 1 300 | 1 400 | 1 600 | 1 800 | 2 000 | 2 200 | 2 400 | 2 600 | |
|
위험 구역까지의 추가 거리 CRO |
||||||||||||
| 2 600 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 2 500 | 400 | 400 | 350 |
300 |
300 | 300 | 300 | 300 | 250 | 150 | 100 | 0 |
| 2 400 | 550 | 550 | 550 | 500 | 450 | 450 | 400 | 400 | 300 | 250 | 100 | 0 |
| 2 200 | 800 | 750 | 750 | 700 | 650 | 650 | 600 | 550 | 400 | 250 | 0 | 0 |
| 2 000 | 950 | 950 | 850 | 850 | 800 | 750 | 700 | 550 | 400 | 0 | 0 | 0 |
| 1 800 | 1 100 | 1 100 | 950 | 950 | 850 | 800 | 750 | 550 | 0 | 0 | 0 | 0 |
| 1 600 | 1 150 | 1 150 | 1 100 | 1 000 | 900 | 850 | 750 | 450 | 0 | 0 | 0 | 0 |
| 1 400 | 1 200 | 1 200 | 1 100 | 1 000 | 900 | 850 | 650 | 0 | 0 | 0 | 0 | 0 |
| 1 200 | 1 200 | 1 200 | 1 100 | 1 000 | 850 | 800 | 0 | 0 | 0 | 0 | 0 | 0 |
| 1 000 | 1 200 | 1 150 | 1 050 | 950 | 750 | 700 | 0 | 0 | 0 | 0 | 0 | 0 |
| 800 | 1 150 | 1 050 | 950 | 800 | 500 | 450 | 0 | 0 | 0 | 0 | 0 | 0 |
| 600 | 1 050 | 950 | 750 | 550 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 400 | 900 | 700 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 200 | 600 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |