








평행 접근
EN ISO 13855:2010에 따른 안전거리 계산기
본 도구의 권장 사항이 모든 상황을 포괄하는 것은 아닙니다. 제품의 안전하고 올바른 사용 및 설치를 위해서는 최신 유효 기준의 관련 표준 및 규정을 반드시 준수해야 합니다. Leuze electronic GmbH + Co. KG는 본 도구 사용으로 인해 발생하는 손해 또는 일반적으로 적용되는 표준 및 지침의 정확성에 대해 어떠한 책임도 지지 않습니다.
안전 레이저 스캐너를 사용한 평행 접근 방식의 영역 보호 최소 거리 계산
 |
최소 거리 SRT는 다음 공식에 따라 계산됩니다: S – 위험 구역과 감지 지점 간의 최소 거리 C: = 1200 mm - 0,4 * H Z – 안전 레이저 스캐너의 추가 거리 |
안전 레이저 스캐너의 경우, IEC 61496-3에 따라 추가 거리를 반드시 고려해야 합니다:
- ZSM – 측정 오차 보정을 위한 값. 이 값은 장치에 따라 달라지며, 해당 사용 설명서에 명시되어 있습니다. Leuze RSL 400 안전 레이저 스캐너의 경우, 보호 영역 반경이 ≤ 6.25m일 때 ZSM 값은 100mm가 적용되며, 보호 영역 반경이 > 6.25m일 때는 ZSM 값이 120mm가 적용됩니다.
- ZREFL: 보호 영역 경계를 넘어 빔 평면 내에서는 레트로 반사판의 사용을 피해야 합니다. 이를 피할 수 없는 경우에는 추가 거리 ZREFL 100mm를 더해야 합니다.
무인 운반 차량(AGV)에 사용하는 경우에 대한 참고 사항:
EN ISO 3691-4 “산업용 차량 – 안전 요구사항 및 검증”에 따라, 보호 장치의 시험은 차량에 지정된 매개변수와 함께 가장 불리한 조건(예: 적재 상태, 운행 경로의 경사 등)도 고려하여 수행해야 합니다. 이러한 요구사항으로 인해 보호 영역의 크기가 증가할 수 있습니다.
안전 라이트 커튼을 사용한 평행 접근 방식의 영역 보호 최소 거리(안전거리) 계산
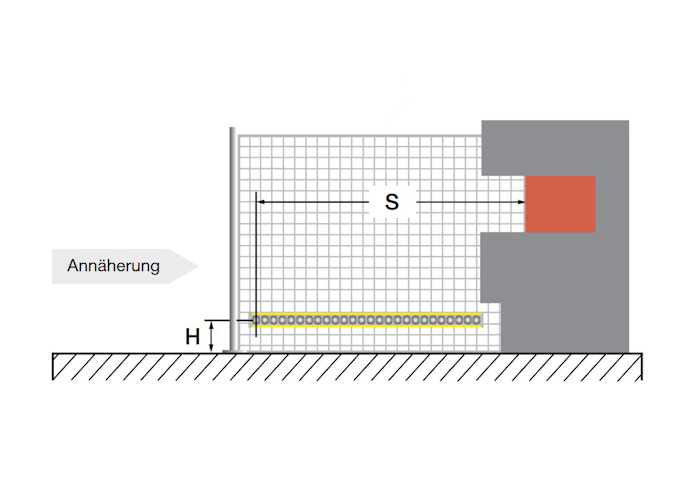 |
최소 거리 SRT는 다음 공식에 따라 계산됩니다: S – 위험 구역과 감지 지점 간의 최소 거리 C – 보호 장치를 작동시키기 전에 위험 영역으로의 침투를 고려하기 위한 안전 관련 상수입니다. C= 1200 mm - 0.4 * H, CMin = 850 mm H: 기준면으로부터의 보호 영역 높이 설치 높이 H에 따른 요구 분해능 d: d [mm] ≤ (H/15) + 50 mm 참고: 300mm를 초과하는 높이는 사람이 아래로 기어 들어갈 수 있는 것으로 간주됩니다. |