








Aproximação ortogonal (ângulo reto)
Assistente de cálculo de acordo com a norma EN ISO 13855:2010
As recomendações deste assistente não têm a pretensão de serem completas. Para o uso e a instalação seguros e corretos dos produtos, os padrões e regulamentos relevantes em sua versão atualmente válida devem ser seguidos. A Leuze electronic GmbH + Co. KG não assume nenhuma responsabilidade por danos resultantes do uso deste assistente e pela precisão das normas e diretrizes gerais em vigor.
Cálculo da distância mínima com aproximação perpendicular e uma Resolução de ≤ 40 mm
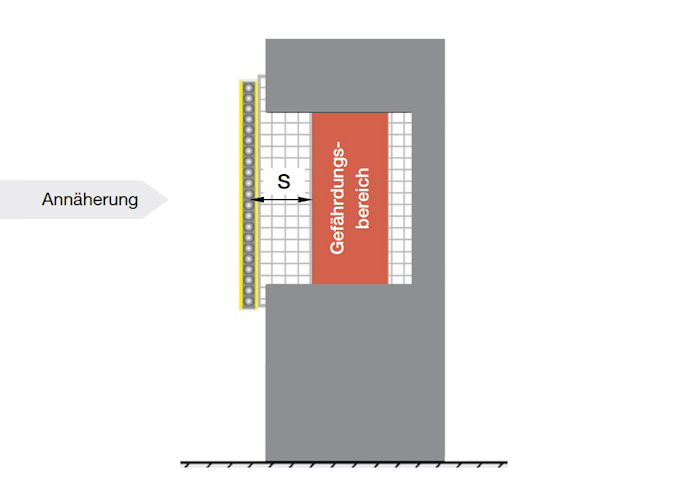 |
A distância mínima SRT é calculada usando a seguinte fórmula: SRT – Distância mínima entre a área de proteção e o ponto de operação |
Nota: Além disso, o valor da tabela para CRO (sobreposição) deve ser determinado se a sobreposição for possível. Se CRO > CRT, o valor de CRO deve ser usado em vez deCRT para determinar a distância mínima.
Inicialmente, o valor de 2,0 mm/ms é usado para K. Se o cálculo resultar em SRT > 500 mm, o cálculo poderá ser repetido com K = 1,6 mm/ms. O resultado do SRT deve ser de pelo menos 500 mm na segunda etapa (se o valor calculado for menor, o SRT será definido como 500 mm).
Atenção: A distância S até o ponto de operação deve ser sempre de, no mínimo, 100 mm, mesmo que um valor menor tenha sido calculado.
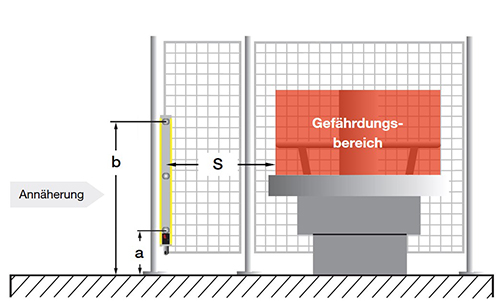
Cálculo da distância mínima com aproximação perpendicular e uma resolução de > 40 mm
Nota: Essa fórmula se aplica a dispositivos de segurança com múltiplos feixes de luz, cortinas de luz de segurança e scanners a laser de segurança com a resolução correspondente.
 |
A distância mínima SRT é calculada usando a seguinte fórmula: SRT – Distância mínima entre a área de proteção e o ponto de operação K – Velocidade de aproximação: 1,6 mm/ms |
S Distância mínima
a: Altura do feixe inferior acima do plano de referência
b: Altura do feixe superior acima do plano de referência
Nota: O valor da tabela para CRO (reach-over) também deve ser determinado. Como regra, esse valor é maior que 850 mm e deve ser usado na fórmula em vez de 850 mm!
|
|
|
|||||||||||
|
Altura da |
Altura da borda superior da área de proteção do equipamento de proteção eletrossensível |
|||||||||||
| 900 | 1.000 | 1.100 | 1.200 | 1.300 | 1.400 | 1.600 | 1.800 | 2.000 | 2.200 | 2.400 | 2.600 | |
|
Distância adicional para a zona de perigo CRO |
||||||||||||
| 2.600 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 2.500 | 400 | 400 | 350 |
300 |
300 | 300 | 300 | 300 | 250 | 150 | 100 | 0 |
| 2.400 | 550 | 550 | 550 | 500 | 450 | 450 | 400 | 400 | 300 | 250 | 100 | 0 |
| 2.200 | 800 | 750 | 750 | 700 | 650 | 650 | 600 | 550 | 400 | 250 | 0 | 0 |
| 2.000 | 950 | 950 | 850 | 850 | 800 | 750 | 700 | 550 | 400 | 0 | 0 | 0 |
| 1.800 | 1.100 | 1.100 | 950 | 950 | 850 | 800 | 750 | 550 | 0 | 0 | 0 | 0 |
| 1.600 | 1.150 | 1.150 | 1.100 | 1.000 | 900 | 850 | 750 | 450 | 0 | 0 | 0 | 0 |
| 1.400 | 1.200 | 1.200 | 1.100 | 1.000 | 900 | 850 | 650 | 0 | 0 | 0 | 0 | 0 |
| 1.200 | 1.200 | 1.200 | 1.100 | 1.000 | 850 | 800 | 0 | 0 | 0 | 0 | 0 | 0 |
| 1.000 | 1.200 | 1.150 | 1.050 | 950 | 750 | 700 | 0 | 0 | 0 | 0 | 0 | 0 |
| 800 | 1.150 | 1.050 | 950 | 800 | 500 | 450 | 0 | 0 | 0 | 0 | 0 | 0 |
| 600 | 1.050 | 950 | 750 | 550 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 400 | 900 | 700 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 200 | 600 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |