








Aproximação paralela
Assistente de cálculo de acordo com a norma EN ISO 13855:2010
As recomendações deste assistente não têm a pretensão de serem completas. Para o uso e a instalação seguros e corretos dos produtos, os padrões e regulamentos relevantes em sua versão atualmente válida devem ser seguidos. A Leuze electronic GmbH + Co. KG não assume nenhuma responsabilidade por danos resultantes do uso deste assistente e pela precisão das normas e diretrizes gerais em vigor.
Cálculo da distância mínima para proteção de área com aproximação paralela usando um scanner a laser de segurança
 |
A distância mínima SRT é calculada usando a seguinte fórmula: S – Distância mínima entre a zona de perigo e o ponto de detecção C: = 1200 mm - 0,4 * H Z – Outras distâncias adicionais com os scanners a laser de segurança |
No caso dos scanner a laser de segurança, a IEC 61496-3 afirma que distâncias adicionais devem ser levadas em conta:
- ZSM para correção do erro de medição. Esse valor depende do dispositivo e é fornecido nas respectivas instruções de operação. Com o scanner a laser de segurança Leuze RSL 400, aplica-se um ZSM de 100 mm para um raio da área de proteção ≤ 6,25 m e um ZSM de 120 mm para um raio da área de proteção > 6,25 m.
- ZREFL: Evite usar retrorrefletores no plano do feixe além do limite do campo de proteção. Se isso não for possível, é necessário acrescentar uma distância adicional ZREFL de 100 mm.
Nota sobre o uso em veículos guiados automaticamente:
De acordo com a norma EN ISO 3691-4 "Caminhões industriais – Requisitos de segurança e verificação", o teste do dispositivo de proteção também deve levar em consideração as condições mais desfavoráveis (por exemplo, carga, inclinação do caminho de transporte) em combinação com os parâmetros especificados para o caminhão. O tamanho do campo de proteção pode aumentar como resultado desses requisitos.
Cálculo da distância mínima (distância de segurança) para proteção de área com aproximação paralela usando uma cortina de luz de segurança
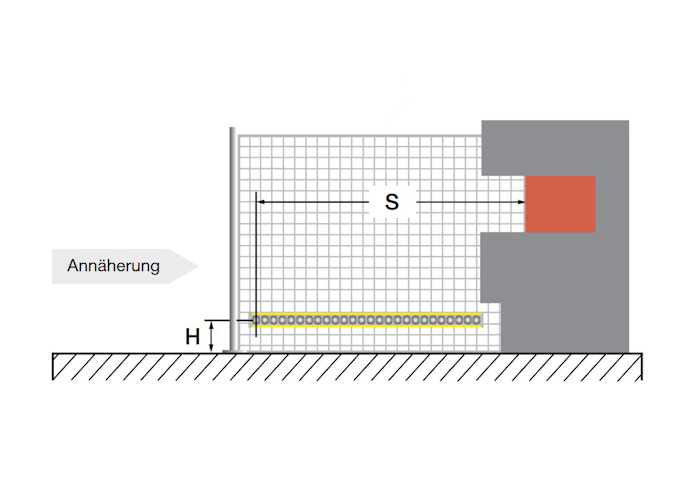 |
A distância mínimaSRT é calculada usando a seguinte fórmula: S – Distância mínima entre a zona de perigo e o ponto de detecção C – Constantes relacionadas à Segurança para levar em conta a entrada na zona de perigo antes de acionar o dispositivo de proteção. C= 1200 mm - 0,4 * H, CMin = 850 mm H: Altura da área de proteção acima do plano de referência Resolução necessária d com altura de montagem H: d [mm] ≤ (H/15) + 50 mm Nota: As alturas > 300 mm são consideradas como possíveis para uma pessoa rastejar. |