








Podejście równoległe
Kreator obliczeń zgodnie z EN ISO 13855:2010
Zalecenia tego kreatora nie mają charakteru wyczerpującego. W celu bezpiecznego i prawidłowego użytkowania oraz instalacji produktów należy przestrzegać odpowiednich norm i przepisów w ich aktualnie obowiązującej wersji. Firma Leuze electronic GmbH + Co. KG nie ponosi odpowiedzialności za szkody wynikające z korzystania z asystenta ani za prawidłowość powszechnie obowiązujących norm i dyrektyw.
Obliczanie minimalnej odległości dla zabezpieczenia obszaru przy podejściu równoległym z użyciem skanera laserowego bezpieczeństwa
 |
Minimalna odległość SRT jest obliczana według następującego wzoru: S - Minimalna odległość między strefą zagrożenia a punktem detekcji C: = 1200 mm - 0,4 * H Z – Dodatkowe odległości w przypadku laserowych skanerów bezpieczeństwa |
W przypadku laserowych skanerów bezpieczeństwa norma IEC 61496-3 stanowi, że należy uwzględnić dodatkowe odległości:
- ZSM w celu skorygowania błędu pomiaru. Wartość ta zależy od urządzenia i jest podana w odpowiedniej instrukcji obsługi. W przypadku laserowego skanera bezpieczeństwa Leuze RSL 400 obowiązuje ZSM 100 mm dla promienia pola ochronnego ≤ 6,25 m i ZSM 120 mm dla promienia pola ochronnego > 6,25 m.
- ZREFL: Należy unikać stosowania retroreflektorów w płaszczyźnie wiązki poza granicą pola ochronnego. Jeśli nie jest to możliwe, należy dodać dodatkową odległość ZREFL wynoszącą 100 mm.
Uwaga dotycząca stosowania w pojazdach autonomicznych (AGV):
zgodnie z EN ISO 3691-4 „Wózki przemysłowe – Wymagania bezpieczeństwa i weryfikacja”, badanie urządzenia ochronnego musi również uwzględniać najbardziej niekorzystne warunki (np. obciążenie, nachylenie trasy transportowej) w połączeniu z parametrami określonymi dla wózka. W wyniku tych wymagań rozmiar pola ochronnego może się zwiększyć.
Obliczanie minimalnej odległości (odległości bezpieczeństwa) dla zabezpieczenia obszaru przy podejściu równoległym z użyciem kurtyny świetlnej bezpieczeństwa
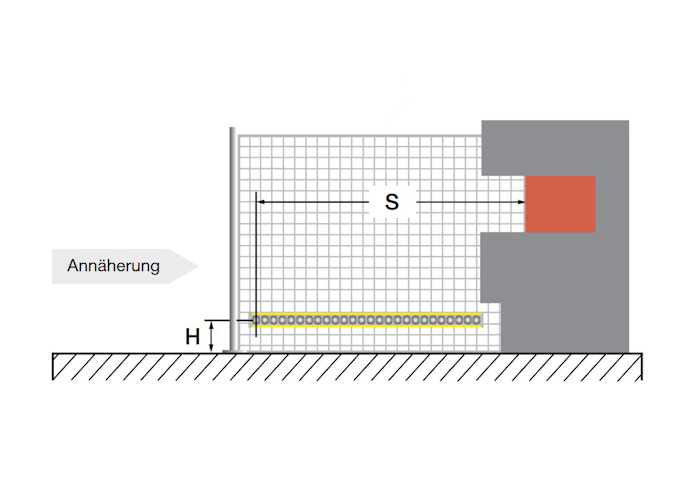 |
Minimalna odległość SRT jest obliczana przy użyciu następującego wzoru: S - Minimalna odległość między strefą zagrożenia a punktem detekcji C – Stałe związane z bezpieczeństwem, uwzględniające wniknięcie do strefy zagrożenia przed zadziałaniem urządzenia ochronnego. C= 1200 mm - 0,4 * H, CMin = 850 mm H: Wysokość pola ochronnego nad płaszczyzną odniesienia Wymagana rozdzielczość d przy wysokości montażu H: d [mm] ≤ (H/15) + 50 mm Uwaga: Wysokości > 300 mm uznaje się za umożliwiające osobie przeczołganie się pod urządzeniem. |